Motion Configuration Instructions
306 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
• A marker test
• A commutation test (for PM motors only)
• Determine important motor parameters
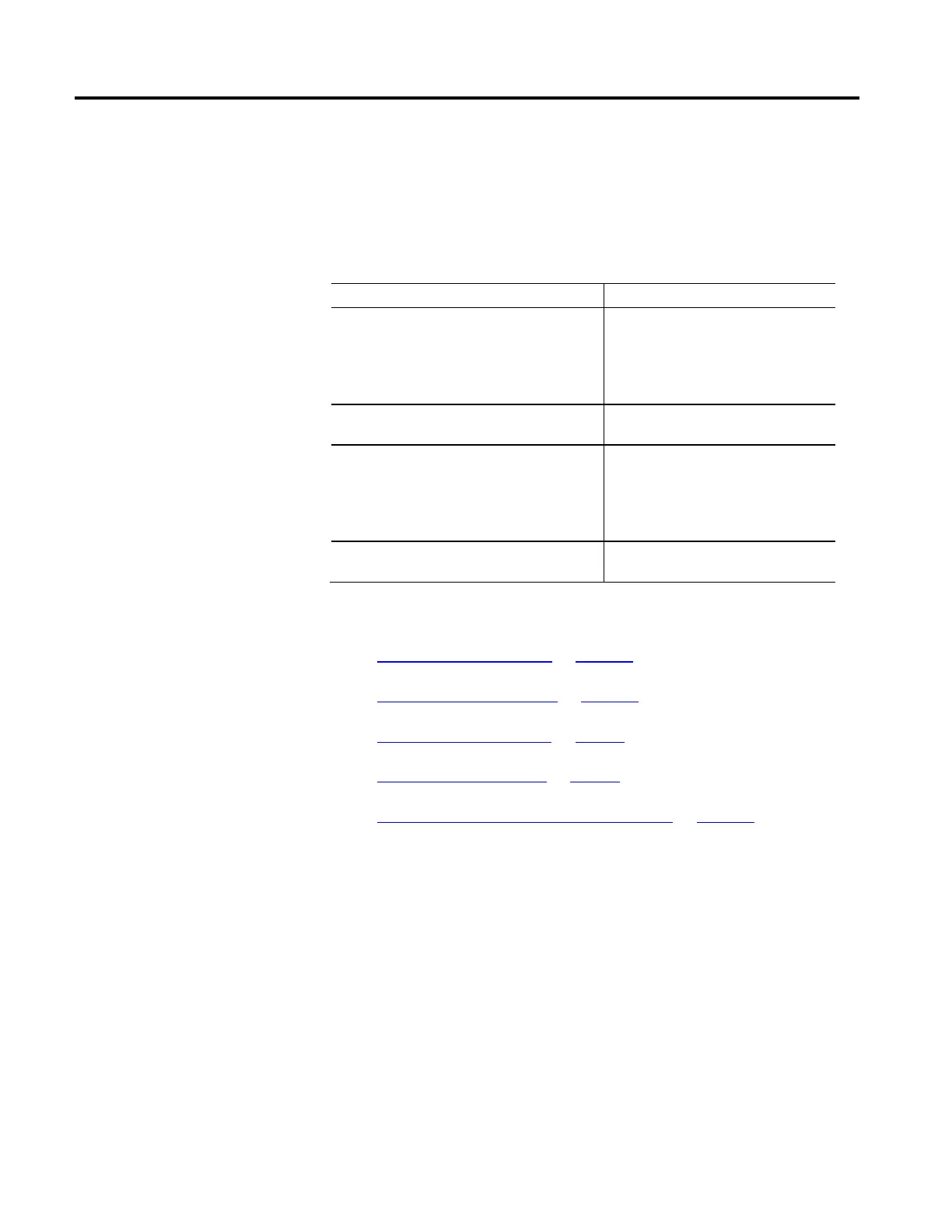
The motion configuration instructions are:
If you want to: Use this instruction:
Compute a complete set of servo gains and dynamic limits
based on a previously executed MRAT instruction.
The MAAT instruction also updates the servo module with the
new gain parameters.
MAAT
Command the servo module to run a tuning motion profile
for an axis.
MRAT
Apply the results of a previously executed MRHD instruction.
The MAHD instruction generates a new set of encoder and
servo polarities based on the observed direction of motion
during the MRHD instruction.
MAHD
Command the servo module to run one of three diagnostic
tests on an axis.
MRHD
See also
Motion Event Instructions on page 235
Motion Group Instructions on page 211
Motion Move Instructions on page 83
Motion State Instructions on page 29
Multi-Axis Coordinated Motion Instructions on page 345
This information applies to the CompactLogix 5370, ControlLogix 5570,
Compact GuardLogix 5370, GuardLogix 5570, and ControlLogix 5580
controllers.
The Motion Apply Axis Tuning (MAAT) instruction is used to compute a
complete set of servo gains and dynamic limits based on the results of a previously
run Motion Run Axis Tuning (MRAT) instruction and update the motion
module with these new gain parameters. While this instruction takes no explicit
parameters, input is derived from the Axis Tuning Configuration parameters as
described in Tune Status Parameter. After execution of the MAAT instruction,
the corresponding axis should be ready for servo activation.
(MAAT)
 Loading...
Loading...







