Common attributes for Motion instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 667
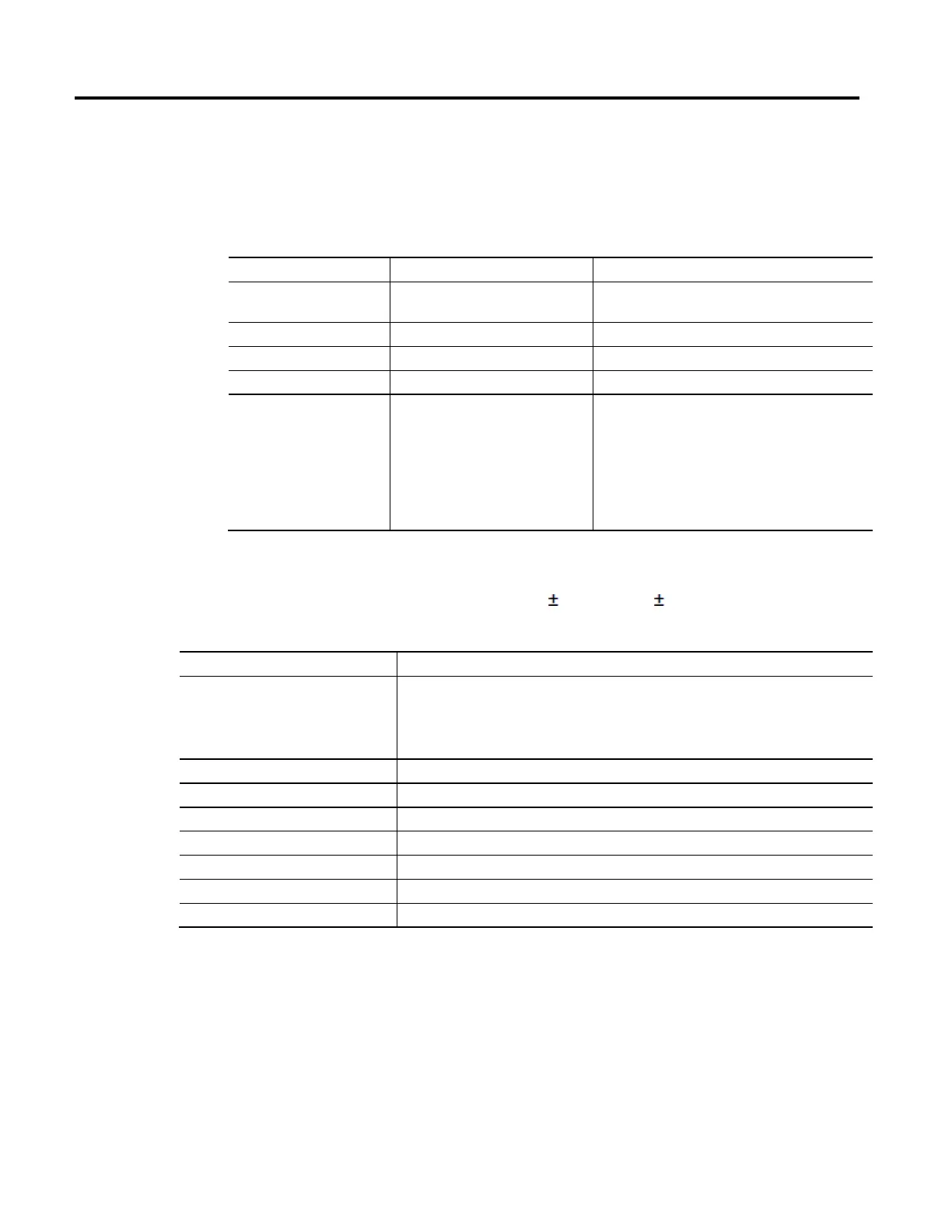
The controller supports the elementary data types defined in IEC 1131-3 defined
data types. The predefined, atomic data types are:
Data type Description Range
BOOL 1-bit boolean 0 = cleared
1 = set
SINT 1-byte integer -128 to 127
INT 2-byte integer -32,768 to 32,767
DINT 4-byte integer -2,147,483,648 to 2,147,483,647
REAL 4-byte floating-point number -3.402823E
38
to -1.1754944E
-38
(negative values)
and
0
and
1.1754944E
-38
to 3.402823E
38
(positive values)
The controller handles all immediate values as DINT data types
The REAL data type also stores
infinity and NAN, but the software
display differs based on the display format.
Data type Description
AXIS_CONSUMED Structure
AXIS_VIRTUAL Structure
AXIS_SERVO Structure
AXIS_SERVO_DRIVE Structure
control structure for an axis
CONTROL Structure control structure for array (file) instruction
COUNTER_Structure control structure for counter instructions
MESSAGE Structure control structure for the MSG instruction
MOTION_GROUP Structure control structure for a motion group
MOTION_INSTRUCTION Structure control structure for motion instructions
PID Structure control structure for the PID instruction
TIMER Structure control structure for timer instructions
Data type conversions
If you mix data types for operands within an instruction, some instructions
automatically convert data to an optimal data type for that instruction. In some
cases, the controller converts data to fit a new data type; in some cases the
controller just fits the data as best it can.