Multi-Axis Coordinated Motion Instructions
458 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Multi-Axis Coordinated Motion Instructions on page 345
Common Attributes on page 663
Data Conversions on page 669
This information applies to the CompactLogix 5370, ControlLogix 5570,
Compact GuardLogix 5370, GuardLogix 5570, Compact GuardLogix 5380,
CompactLogix 5380, CompactLogix 5480, ControlLogix 5580, and GuardLogix
5580 controllers.
Use the Motion Coordinated Shutdown (MCSD) instruction to perform a
controlled shutdown of all the axes in the named coordinate system.
Important:
Tags used for the motion control attribute of instructions should only be
used once. Re-use of the motion control tag in other instructions can cause
unintended operation. This may result in damage to equipment or
personal injury.
Important:
Risk of Velocity and/or End Position Overshoot
If you change move parameters dynamically by any method, that is by
changing move dynamics (MCD or MCCD) or by starting a new instruction
before the last one has completed, be aware of the risk of velocity and/or
end position overshoot.
A Trapezoidal velocity profile can overshoot if maximum deceleration is
decreased while the move is decelerating or is close to the deceleration
point.
An S-curve velocity profile can overshoot if:
maximum deceleration is decreased while the move is decelerating or
close to the deceleration point; or
maximum acceleration jerk is decreased and the axis is accelerating. Keep
in mind, however, that jerk can be changed indirectly if it is specified in %
of time.
Available Languages
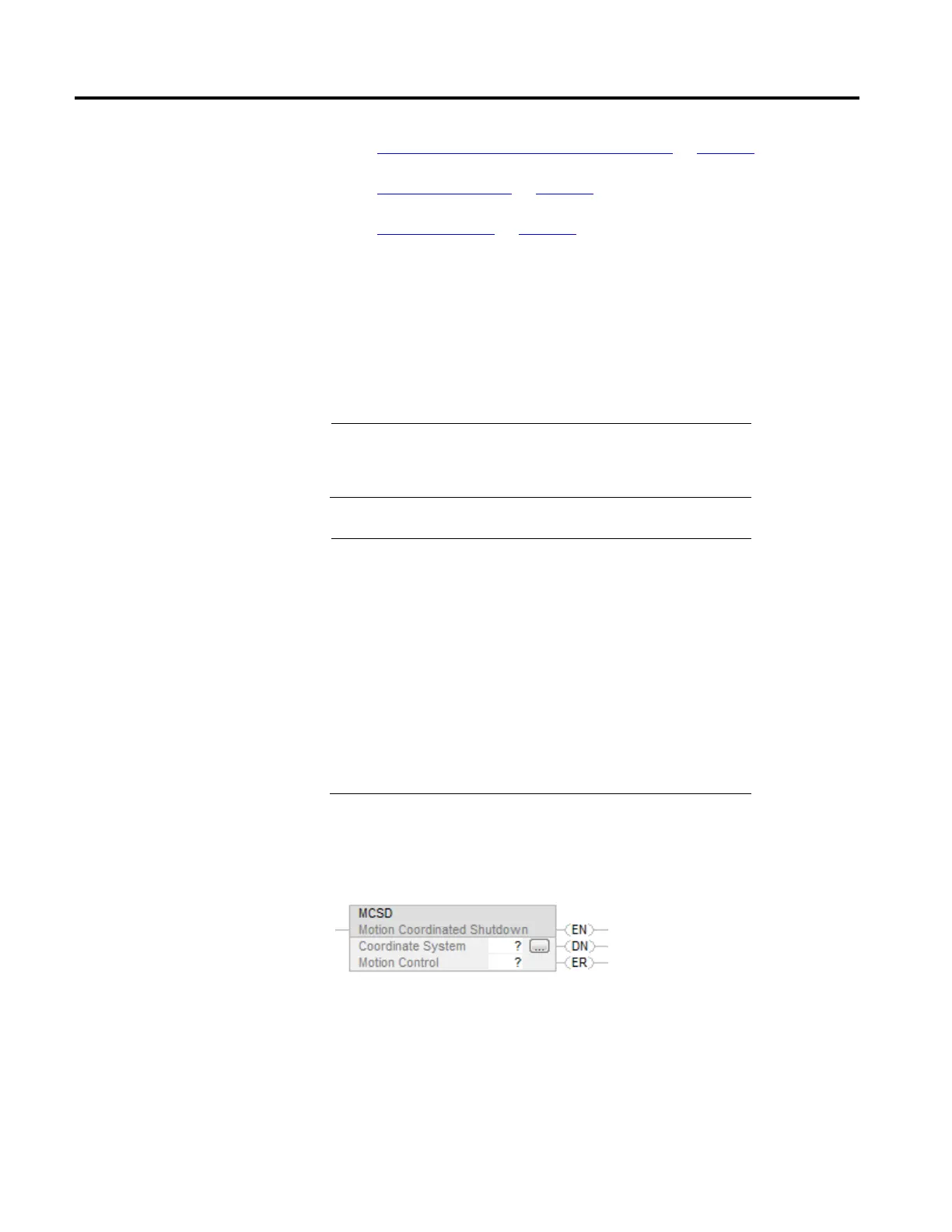
Ladder Diagram
Function Block
This instruction is not available in function block.
Structured Text
MCSD(CoordinateSystem, MotionControl);
Shutdown (MCSD)
 Loading...
Loading...







