Overview of Structured Text Programming
660 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
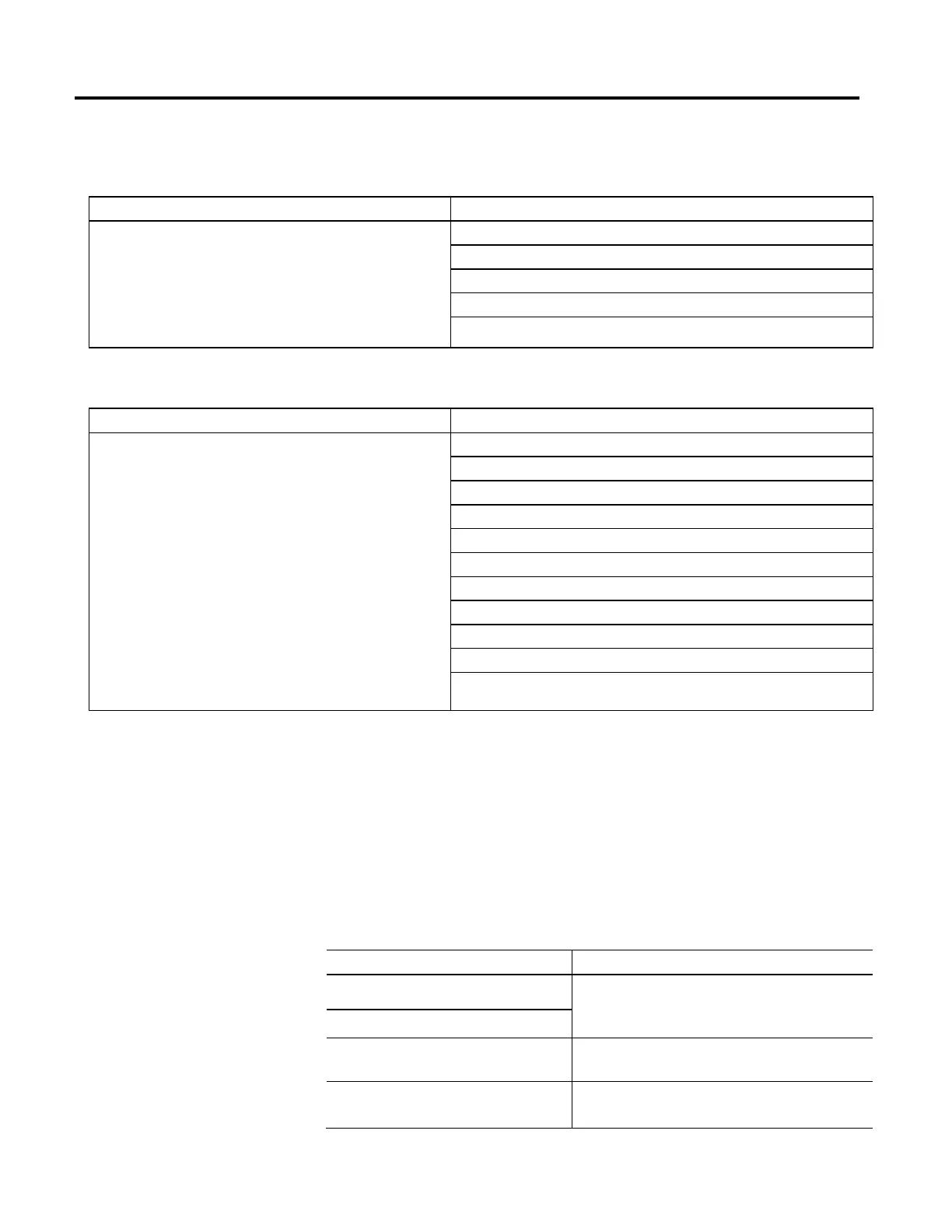
Example 1
If you want this Enter this structured text
The REPEAT_UNTIL loop executes the statements in the construct and then
determines if the conditions are true before executing the statements again. This
differs from the WHILE_DO loop because the WHILE_DO The WHILE_DO loop
evaluates its conditions first.
If the conditions are true, the controller then executes the statements within the
loop. The statements in a REPEAT_UNTIL loop are always executed at least once.
The statements in a WHILE_DO loop might never be executed.
pos := -1;
REPEAT
pos := pos + 2;
UNTIL ((pos = 101) OR (structarray[pos].value = targetvalue))
end_repeat;
Example 2
If you want this Enter this structured text
Move ASCII characters from a SINT array into a string tag. (In a SINT array, each
element holds one character.) Stop when you reach the carriage return.
Initialize Element_number to 0.
Count the number of elements in SINT_array (array that contains the ASCII
characters) and store the result in SINT_array_size (DINT tag).
Set String_tag[element_number] = the character at
SINT_array[element_number].
Add 1 to element_number. This lets the controller check the next character in
SINT_array.
Set the Length member of String_tag = element_number. (This records the
number of characters in String_tag so far.)
If element_number = SINT_array_size, then stop. (You are at the end of the
array and it does not contain a carriage return.)
If the character at SINT_array[element_number] = 13 (decimal value of the
carriage return), then stop.
element_number := 0;
SIZE(SINT_array, 0, SINT_array_size);
Repeat
String_tag.DATA[element_number] := SINT_array[element_number];
element_number := element_number + 1;
String_tag.LEN := element_number;
If element_number = SINT_array_size then
exit;
end_if;
Until SINT_array[element_number] = 13
end_repeat;
To make your structured text easier to interpret, add comments to it.
• Comments let you use plain language to describe how your structured text
works.
• Comments do not affect the execution of the structured text.
To add comments to your structured text:
To add a comment Use one of these formats
on a single line //comment
(*comment*)
/*comment*/
at the end of a line of structured text
within a line of structured text (*comment*)
/*comment*/
that spans more than one line (*start of comment. . .end of comment*)
/*start of comment. . .end of comment*/
Components: Comments
 Loading...
Loading...







