Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 529
Example 2
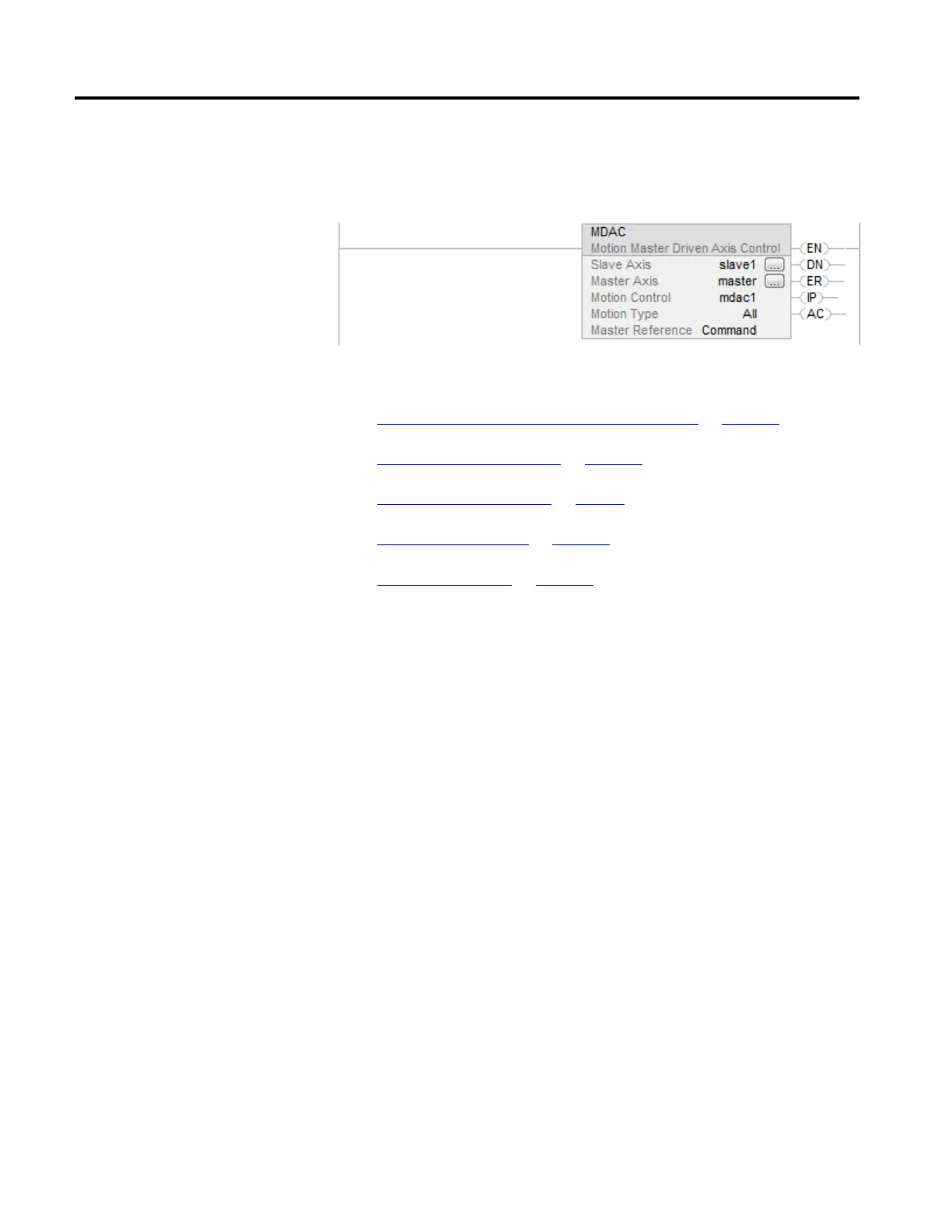
Ladder Diagram
See also
Common Action Table for Slave and Master Axis on page 531
Motion Error Codes (.ERR) on page 557
Motion Move Instructions on page 83
Structured Text Syntax on page 635
Common Attributes on page 663
Changing the motion mode between Master Driven and Time Driven mode and
vice versa is automatically performed when a new motion instruction, such as,
MAM, MAJ, or MATC, is activated and the new instruction is programmed in a
different mode than the active motion instruction.
When the new motion instruction is activated, the system assumes that the
desired mode for the new instruction is the mode (Master Driven or Time
Driven) as specified in the programmed units of the speed parameter contained in
the new instruction. At all times, including when changing modes, the Accel,
Decel, and Jerk must all be programmed in the same units as the Speed parameter
or the instruction receives a MDSC_UNITS_CONFLICT_ERROR error.
A runtime MDSC_INVALID_MODE_OR_MASTER_CHANGE error occurs
only if you attempt to change from Time Driven mode to MDSC mode, or vice
versa with an MCD instruction.
If you change from Time Driven mode to Master Driven mode while an axis is
moving and Lock Direction is not Immediate Forward or Reverse your receive
error 95, DSC Lock Direction Conflict.
If both the master and slave axes are idle or paused, the MAM or MAJ can make a
change on the slave. However, the error MDSC
IDLE_MASTER_AND_SLAVE_MOVING is generated if MDSC mode is
started while the slave is moving when the master is idle.
Driven and Time Driven
Modes for Single Axis
Motion Instructions
 Loading...
Loading...







