Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 377
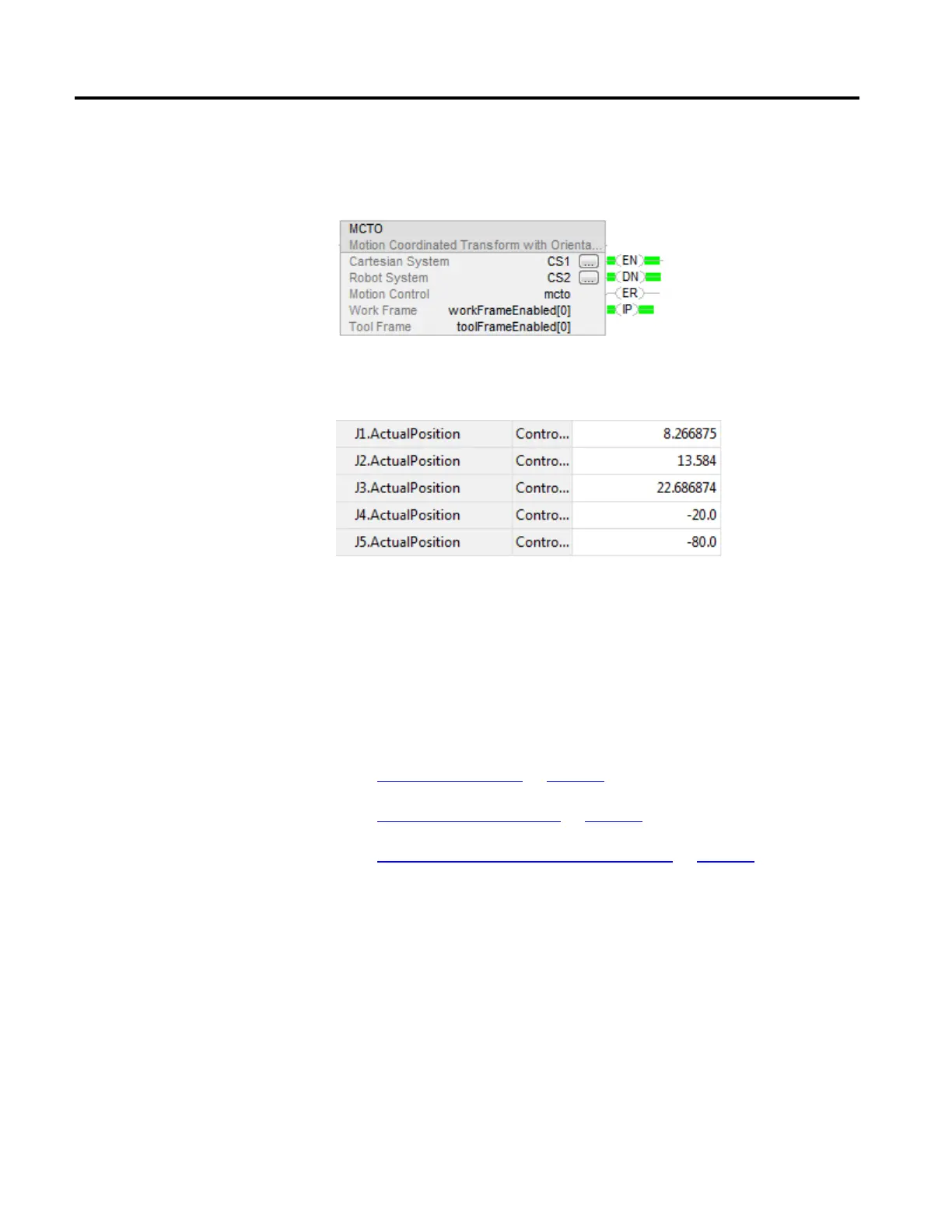
Consider that the MCTO is programmed with tool frame offsets also enabled for
Ry = 50 along with the work frame offsets. MCTO will now compute the
Cartesian positions with respect to the end of the new work frame and tool frame.
After programming a move to the same end position the corresponding Joint angle
positions are as shown in the following diagram.
For more information on configuring offsets, see Configure Coordinate System
Offsets.
Structured Text
MCTO(CS1, CS2, MCTO1, 0, 0);
See also
Index Through Arrays on page 663
Motion Error Codes (.ERR) on page 557
Multi-Axis Coordinated Motion Instructions on page 345
This information applies to the Compact GuardLogix 5380, CompactLogix 5380,
CompactLogix 5480, ControlLogix 5580, and GuardLogix 5580 controllers.
Use the MCPM instruction to start a multi-dimensional coordinated path move
for the specified Primary axes (X, Y, Z) and orientation axes (Rx, Ry, Rz) of a
Cartesian coordinate system. Use this instruction to program Cartesian moves on
robots with orientation control.
Motion Coordinated Path Move
(MCPM)
 Loading...
Loading...







