Chapter 5 Trial Operation and Tuning ASDA-M
5-6 Revision December, 2014
5.3 JOG Trial Run without Load
It is very convenient to test the motor and servo drive with the method of JOG trial run
without load since the extra wiring is unnecessary. For safety reasons, it is recommended
to set JOG at low speed. Please see the following descriptions.
STEP 1: Use software setting to Servo ON. Select the desired JOG axis and set parameter
P2-30 to 1. This setting is to force the servo ON through software.
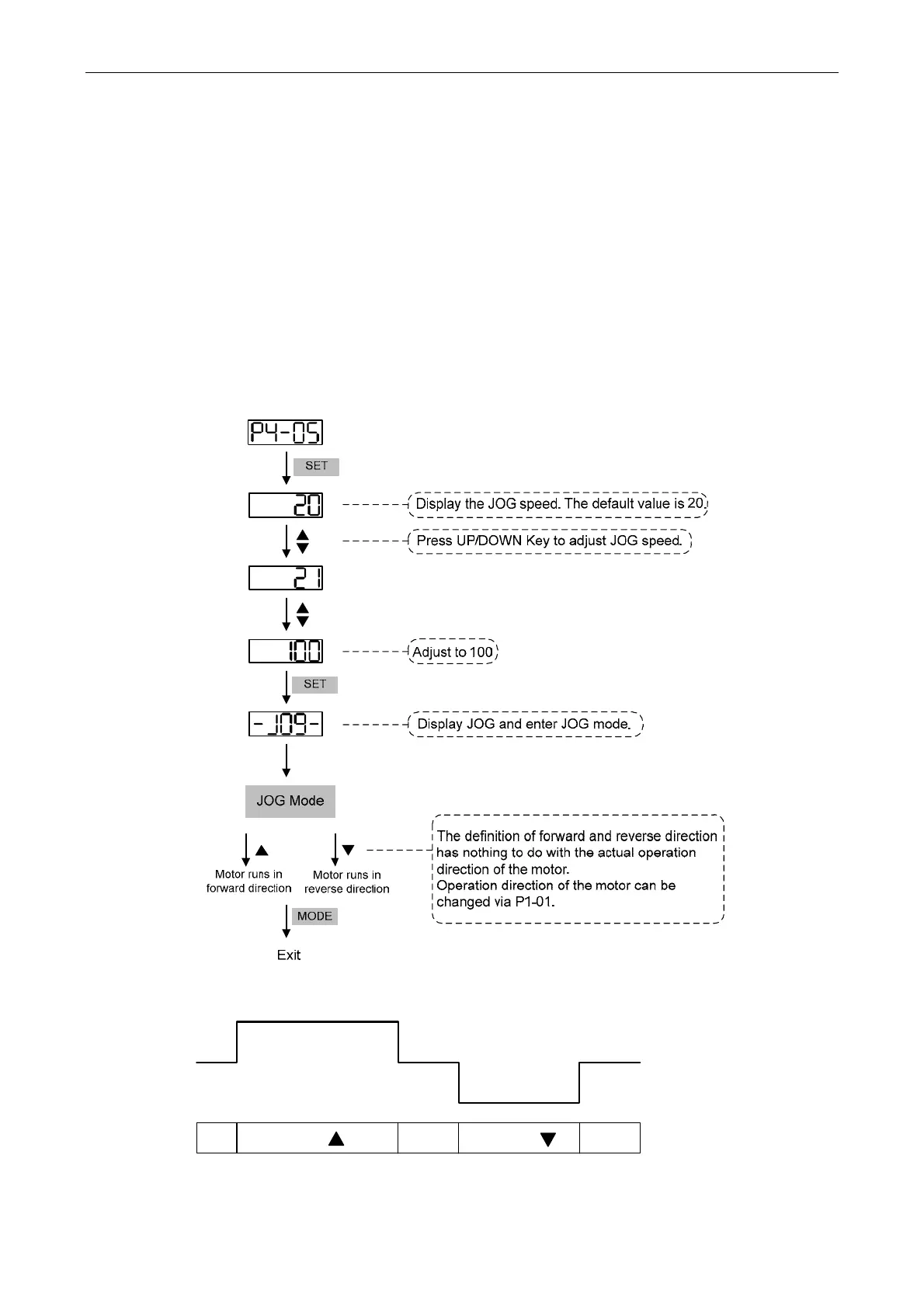
STEP 2: Set P4-05 as JOG speed (unit: r/min). After setting the desired JOG speed, press
the SET Key, the servo drive will enter JOG mode.
STEP 3: Press the MODE Key to exit JOG mode.
In this example, the JOG speed is adjusted from 20r/min to 100r/min.
Release
Press Press
Motor Stops
Speed
0
If the servo motor does not rotate properly, please make sure the phase of U, V, W cables is connected correctly.
If the servo motor does not rotate, please make sure the wiring of U, V, W terminals and encoder is correct
Motor rotates in
forward direction
Motor rotates in
reverse direction
 Loading...
Loading...