ASDA-M Chapter 6 Control Mode of Operation
Revision December, 2014 6-61
6.6.4 The Use of Mechanical Brake
When operating mechanical brake via servo drive, if the DO signal, BRKR is set to OFF, it
means the mechanical brake is not working and the motor will be locked. If BRKR is set
to ON, it means the mechanical brake is working and the motor can operate. The
operation of mechanical brake has two kinds. Users can set the relevant dealy via regiser
MBT1 (P1-42) and MBT2 (P1-43). It is usually applied in Z axis in order to reduce the
heat generated when servo motor puts up resistance and shorten its lifetime. In order to
avoid the error of mechanical brake, it must be worked when the servo drive is off. To
operate the mechanical brake, the brake has to be activated before the motor stops
running (Servo OFF). The brake has to be released after Servo ON. Otherwise, it would
becomone the loading of the motor and might damage the brake.
If it works during the process of acceleration or constant speed, the servo drive needs to
generate more current to resist the brakeforce of mechanical brake and it might cause
the alarm of overload warning.
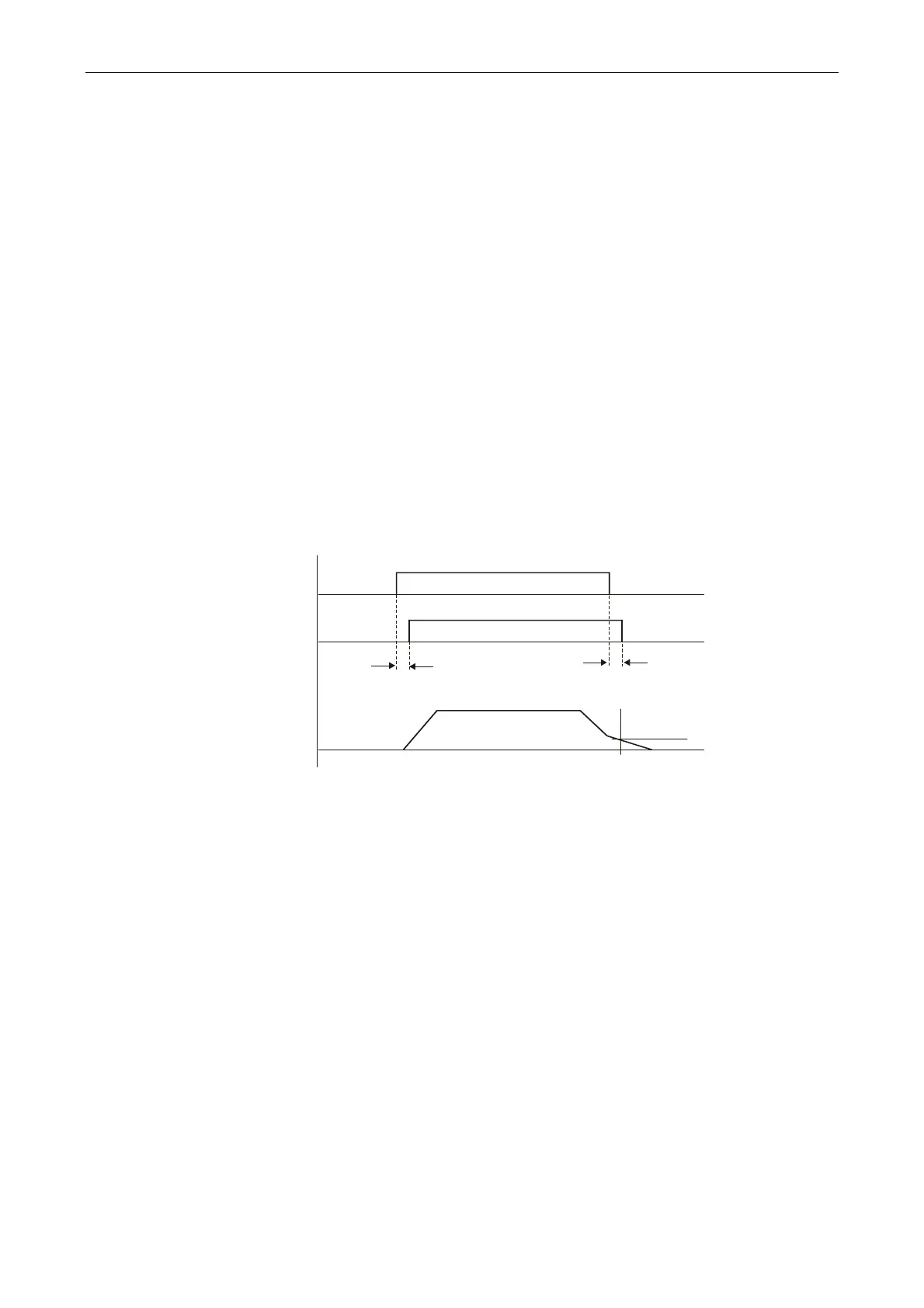
Timing diagram of mechanical brake control:
OFF
ON
SON
(DI Input)
BRKR
(DO Output)
Motor Speed
MBT1(P1-42)
MBT2(P1-43)
ZSPD(P1-38)
ON
OFF
OFF
OFF
The output timing of BRKR:
1. When Servo OFF, go through the time set by P1-43 and the motor speed is faster
than the setting in P1-38, DO.BRKR is OFF (mechanical brake is locked).
2. When Servo OFF, has not reached the time set by P1-43 but the motor speed is
slower than the setting in P1-38, DO.BRKR is OFF (mechanical brake is locked).
 Loading...
Loading...