ASDA-M Chapter 5 Trial Operation and Tuning
Revision December, 2014 5-9
5.5 Trial Run without Load (Position Mode)
Before the trial run without load, firmly secure the motor base so as to avoid the danger
cause by the reaction of motor operation.
STEP 1:
Set the control mode of the servo drive to position mode.
Firstly select the desired axis for speed test, and set parameter P1-01 to 1. Then, re-power
on the servo drive.
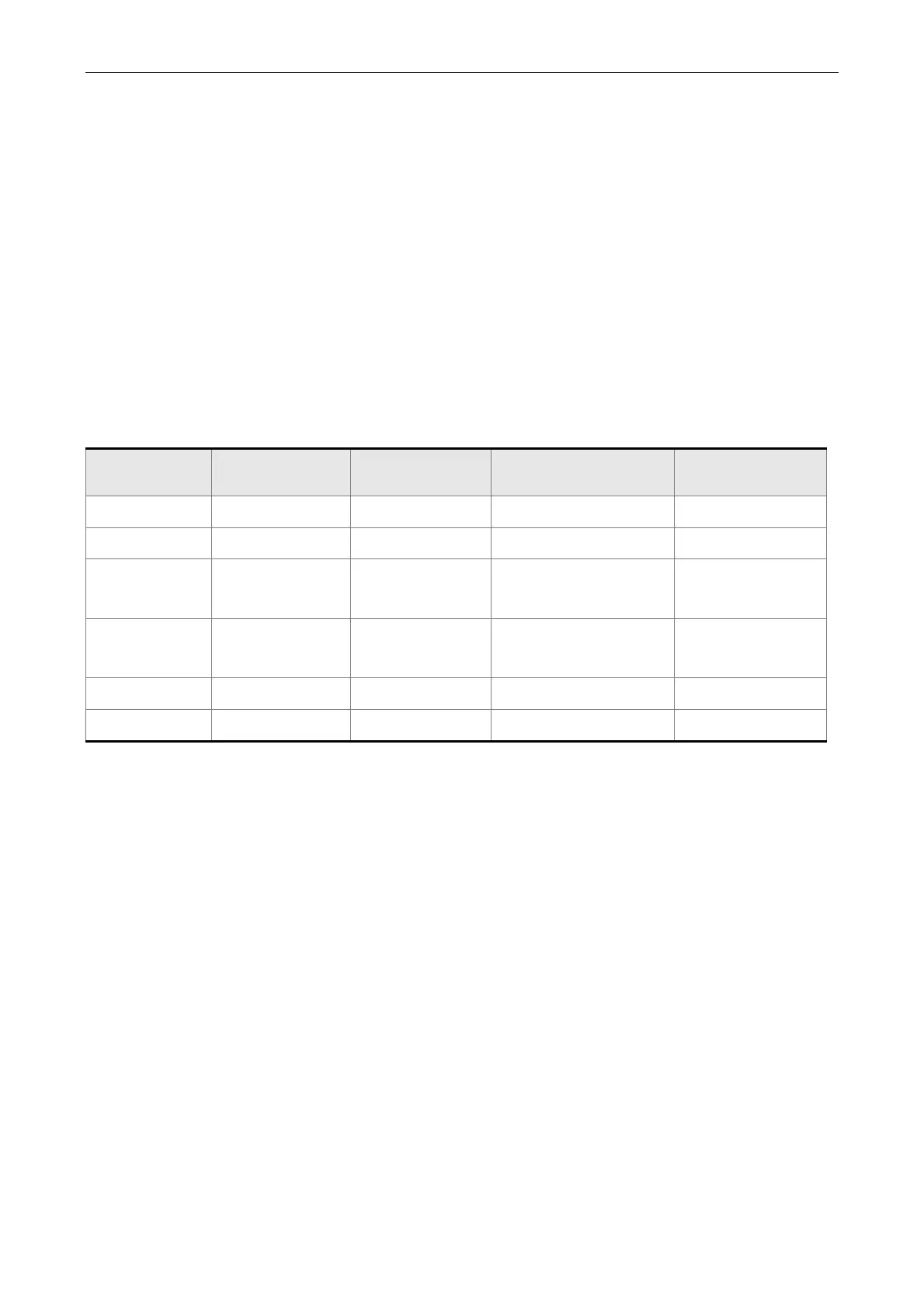
STEP 2: In position mode, the digital input settings of trial run are as follows:
Digital Input
Parameter
Setting Value
Symbol Function Description CN1 Pin No
DI1 P2-10 = 101 SON Servo ON DI1- = 9
DI2 P2-11 = 108 CTRG Torque limit DI2- = 10
DI3 P2-12 = 111 POS0
Position command
selection
DI3- = 34
DI4 P2-13 = 112 POS1
Position command
selection
DI4- = 8
DI5 P2-14 = 102 ARST Alarm reset DI5- = 33
DI6 P2-15 = 0 Disabled Invalid DI function -
The above table disables the function of emergency stop (DI6) (the default setting), thus,
set P2-15 to 0 (Disabled). The digital input of Delta’s servo drive can be programmed by
users. When programming digital input, please refer to the description of DI code.
The default setting includes the function of negative limit, positive limit and emergency stop,
therefore, after the setting is completed, if there is any alarm occurs, please re-power on
the servo drive or switch ON DI5 to clear the alarm. Please refer to Chapter 5.2.
 Loading...
Loading...