Chapter 7 Motion Control ASDA-M
7-30
Revision December, 2014
7.10 The Description of E-Cam Function
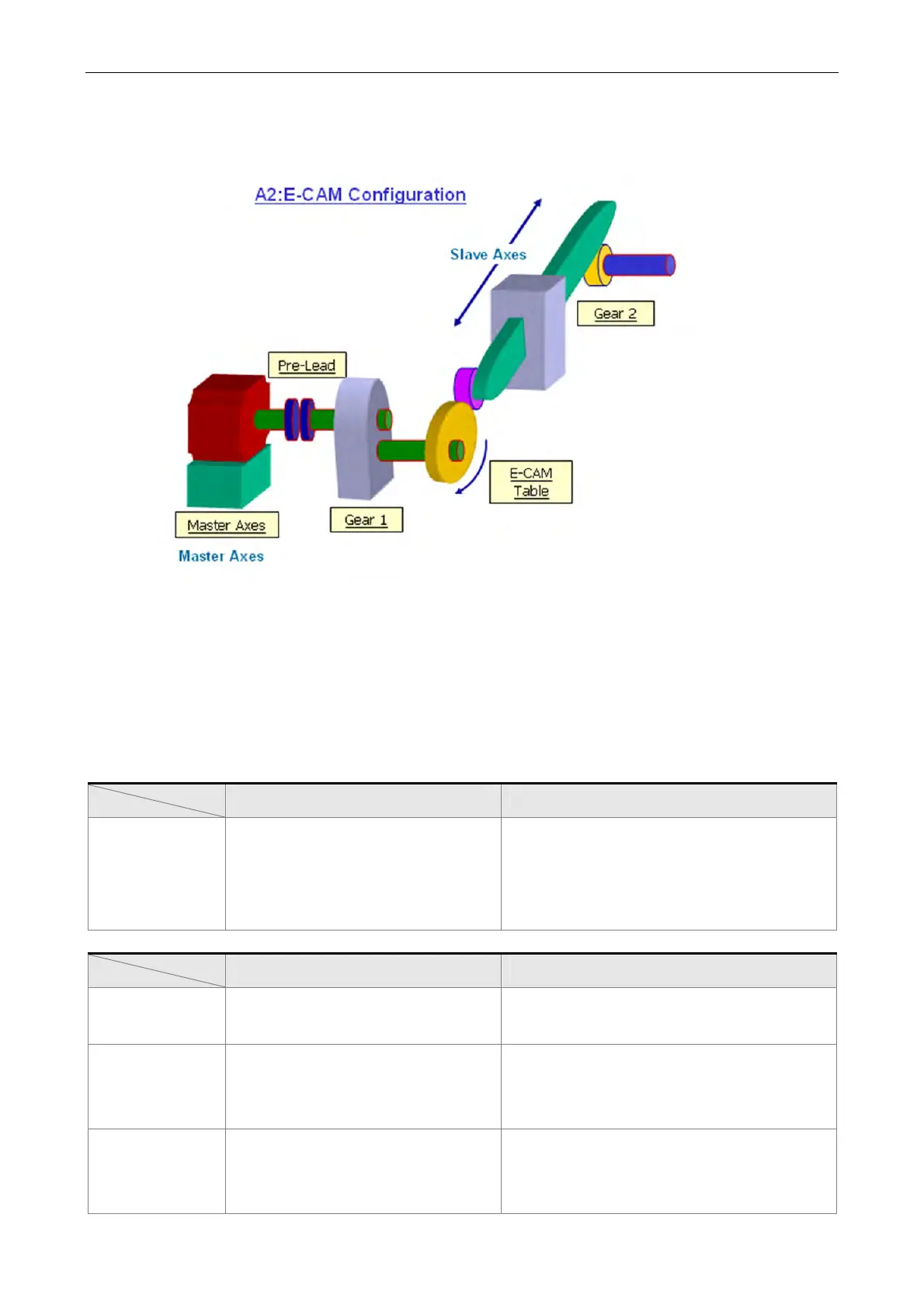
E-Cam is a virtual cam which is implemented by software. It includes Master axis and Slave
axis. The illustration is as the following:
In PT mode, the position command (slave) is issued by the external pulse input (master).
The two is merely the linear scaling relation (its scaling equals to e-gear ratio). However,
instead of linear scaling, E-Cam is defined by cyclic curve profile, just like the cam shape. In
physical machine cam, slave axis can operate as variable speed motion, alternating motion,
intermittent motion, etc by master axis with the constant speed motion. It is very extensive
in application. Using E-Cam could have similar effect. The following table describes the
differences between E-Cam and Machine Cam.
Machine Cam E-Cam
Structure
Return to the original position
after rotating a cycle.
It might not return to the original
position after rotating a cycle. The
structure could be in spiral shape like
mosquito coil incense.
Machine Cam E-Cam
Smooth
Performance
It is determined by the fineness
of the real process.
It is interpolated by cubic curve via
software
Position
Accuracy
Very precise (when it has no
vibration)
The command is very precise, but the
actual position might have deviation
due to the servo delay.
Long Distance
Motion
The longer the slave axis is,
the bigger the cam will be. It is
not easy to make.
Change the value of the table will do. It
is easy to realize.
 Loading...
Loading...