110
Robot welding
Prerequisite A robot interface or field bus system is needed in order to be able to control the power
source from a robot control unit.
General 2-step mode is selected automatically if a ROB 4000 / 5000 robot interface or field bus sys-
tem is connected. The mode can only be changed using the Mode button when the robot
interface or field bus has been disconnected from the LocalNet.
If a ROB 3000 robot interface is connected, any mode (2-step mode, 4-step mode, special
4-step mode, etc.) can be selected.
More information about robot welding can be found in the operating instructions for the ro-
bot interface or field bus systems and in the "Robot-interface" leaflet (42,0410,0616).
Special 2-step
mode for robot in-
terface
The special 2-step mode function is available if a robot interface or field bus system is con-
nected to the LocalNet.
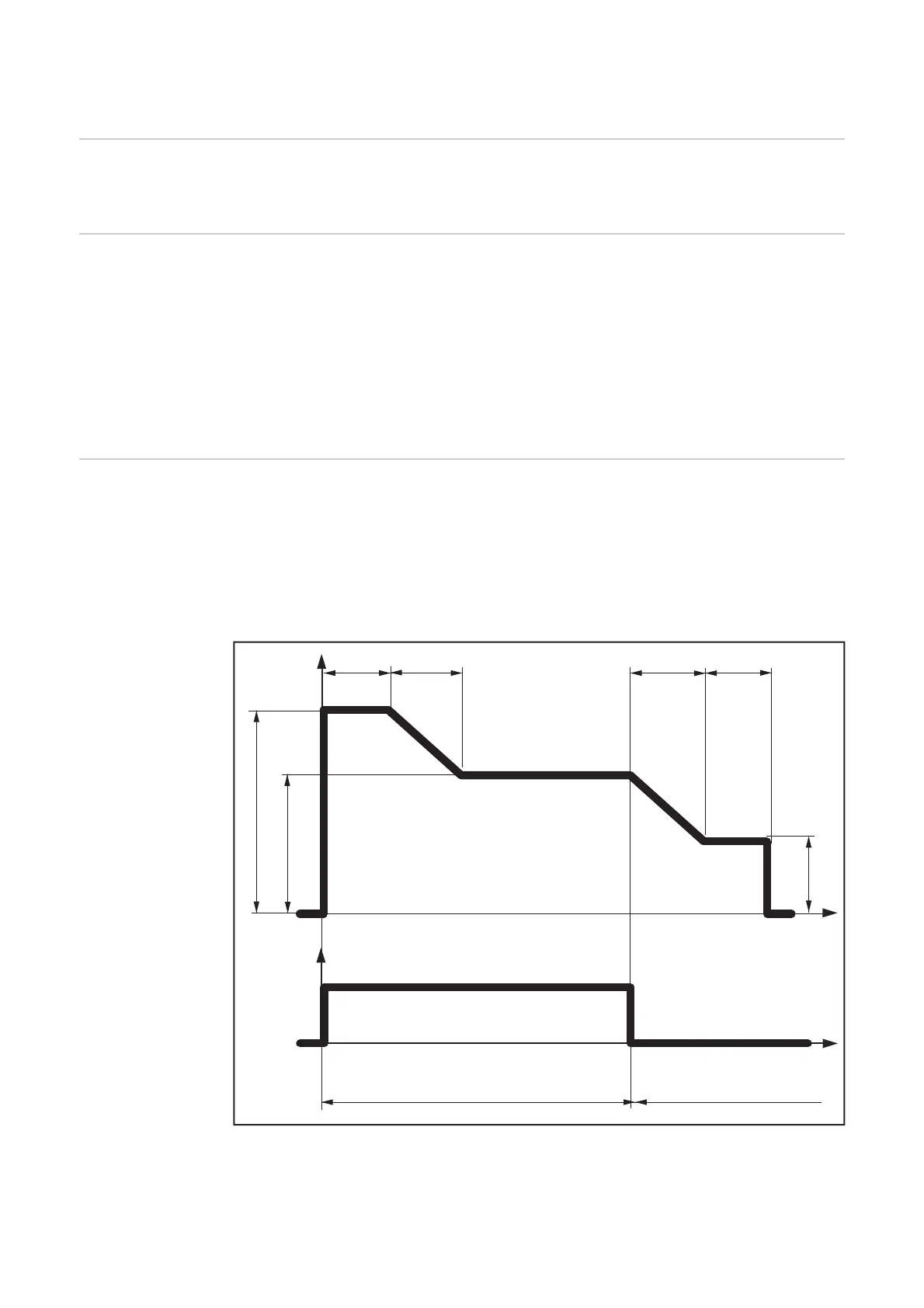
Function of special 2-step mode for robot interface
I-S = Starting current phase SL = Slope I-E = End-crater phase
t-S = Starting current dura- t-E = Final current duration Signal = Robot signal
ON = Welding start OFF = Welding stop
Function of special 2-step mode
Signal
0
1
I
I-S
I-E
E-tLSLSS-t
I
t
t
OFFON
 Loading...
Loading...