98
6 Programming: Programming Contours
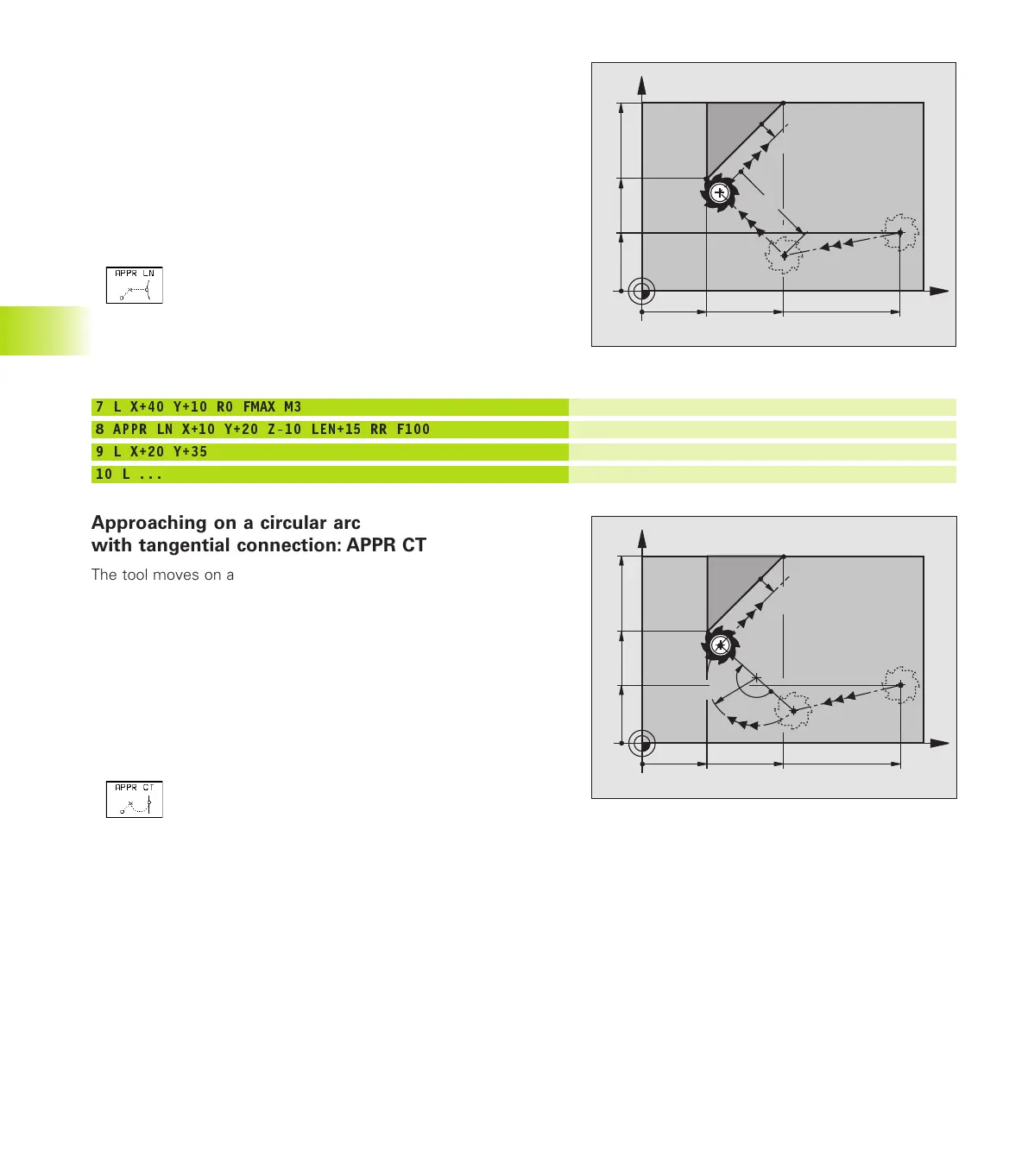
Approaching on a straight line perpendicular to the
first contour point: APPR LN
The tool moves on a straight line from the starting point P
S
to an
auxiliary point P
H
. It then moves from P
H
to the first contour point P
A
on a straight line perpendicular to the first contour element. The
auxiliary point P
H
is separated from the first contour point P
A
by the
distance LEN plus the tool radius.
ú
Use any path function to approach the starting point P
S
.
ú
Initiate the dialog with the APPR/DEP key and APPR LN soft key:
ú Coordinates of the first contour point P
A
ú
Length: Distance to the auxiliary point P
h.
Always enter
LEN as a positive value!
ú
Radius compensation RR/RL for machining
Example NC blocks
7 L X+40 Y+10 R0 FMAX M3
8 APPR LN X+10 Y+20 Z-10 LEN+15 RR F100
9 L X+20 Y+35
10 L ...
Approaching on a circular arc
with tangential connection: APPR CT
The tool moves on a straight line from the starting point P
S
to an
auxiliary point P
H
. It then moves from P
H
to the first contour point P
A
following a circular arc that is tangential to the first contour
element.
The arc from P
H
to P
A
is determined through the radius R and the
center angle CCA. The direction of rotation of the circular arc is
automatically derived from the tool path for the first contour
element.
ú
Use any path function to approach the starting point P
S
.
ú
Initiate the dialog with the APPR/DEP key and APPR CT soft key:
ú
Coordinates of the first contour point P
A
ú
Radius R of the circular arc
■
If the tool should approach the workpiece in the
direction defined by the radius compensation:
Enter R as a positive value.
■
If the tool should approach the workpiece opposite to
the radius compensation:
Enter R as a negative value.
ú Center angle CCA of the arc
■
CCA can be entered only as a positive value.
■
Maximum input value 360°
ú Radius compensation RR/RL for machining
Approach P
S
without radius compensation
P
A
with radius comp. RR
End point of the first contour element
Next contour element
X
Y
10
10
20
P
A
RR
P
S
R0
P
H
RR
RR
40
15
35
20
X
Y
10
20
P
A
RR
P
S
R0
P
H
RR
RR
4010
CCA=
180°
R10
35
20
6.3 Contour Approach and Departure
Gkap6.pm6 30.06.2006, 07:0498
www.EngineeringBooksPdf.com
 Loading...
Loading...





