5 Basic Operations and Trial Run
-
66
-
5
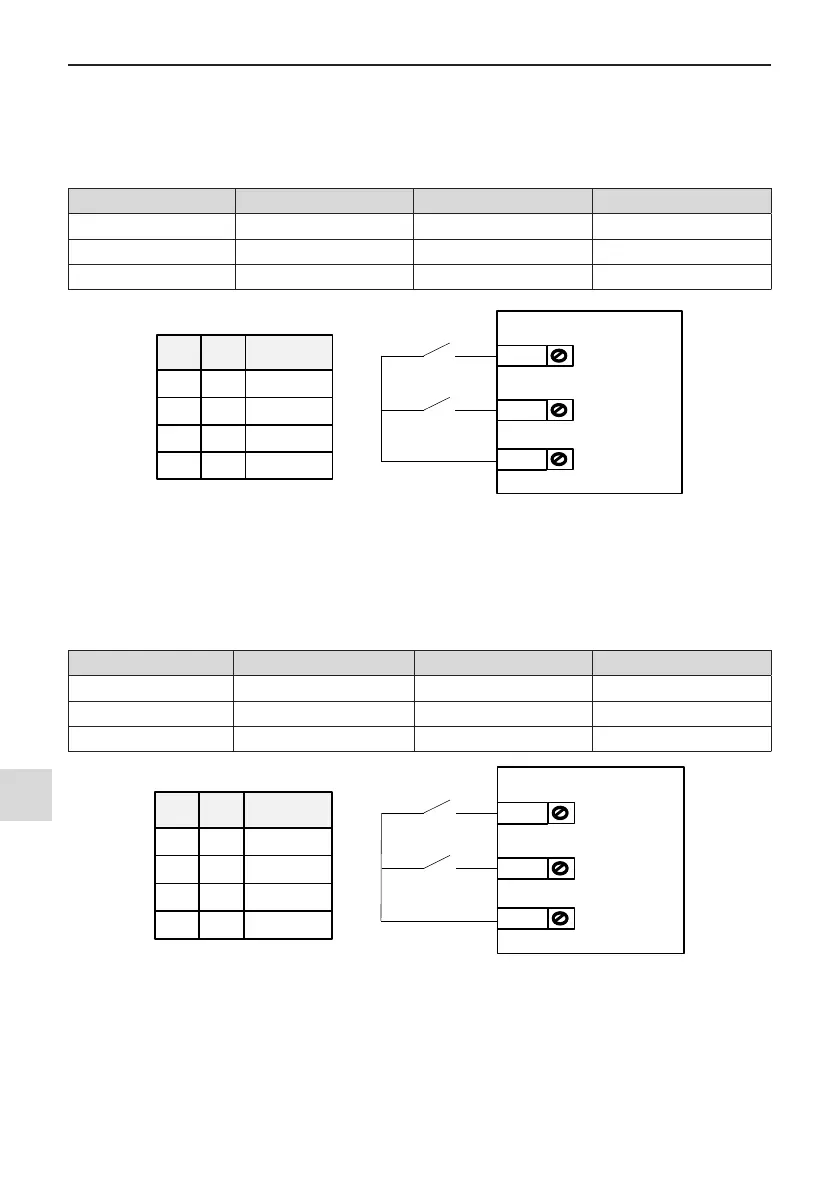
The following example takes DI1, DI2 and DI3 to describe how to control the AC drive via DI terminals. Set F4-
00 to F4-02 to select DI1, DI2 and DI3. For details, see setting ranges of F4-00 to F4-09.
F4-11 = 0: Two-wire Control Mode 1. It is the most commonly used two-wire control mode. Allocate DI1 with
forward run function and DI2 with reverse run function.
The parameters are set as below:
Function Code Parameter Name Value Function Description
F4-11 Terminal I/O control mode 0 Two-wire control mode 1
F4-00 DI1 function selection 1 Forward RUN (FWD)
F4-01 DI2 function selection 2 Reverse RUN (REV)
K1
1
0
1
0
K2
0
1
1
0
Running
Command
Forward
Reserve
Stop
Stop
DI1
FWD
DI2
COM
K1
K2
REV
Figure 5-5 Two-wire control mode 1
In this mode, when K1 is closed, drive rotates in forward direction. When K2 is closed, drive rotates in reverse
direction. When K1 and K2 are both open or closed simultaneously, drive stops.
F4-11 = 1: Two-wire Control Mode 2. In this mode, DI1 is RUN enabled terminal, and DI2 determines running
direction.
The parameters are set as below:
Function Code Parameter Name Value Function Description
F4-11 Terminal I/O control mode 1 Two-wire control mode 2
F4-00 DI1 function selection 1 RUN enabled
F4-01 DI2 function selection 2 Running direction
K1
1
1
0
0
K2
0
1
0
1
Running
Command
Forward
Reserve
Stop
Stop
DI1
Run enabled
Running direction
DI2
COM
K1
K
2
Figure 5-6 Two-wire control mode 2
In this mode, when K1 is closed, motor rotates in forward direction with K2 open. When K1 is closed, motor
rotates in reverse direction with K2 closed. When K1 is open, motor stops no matter whether K2 is open or
closed.