6 Troubleshooting and Solutions
-
74
-
6
6.2 Troubleshooting During Trial Run
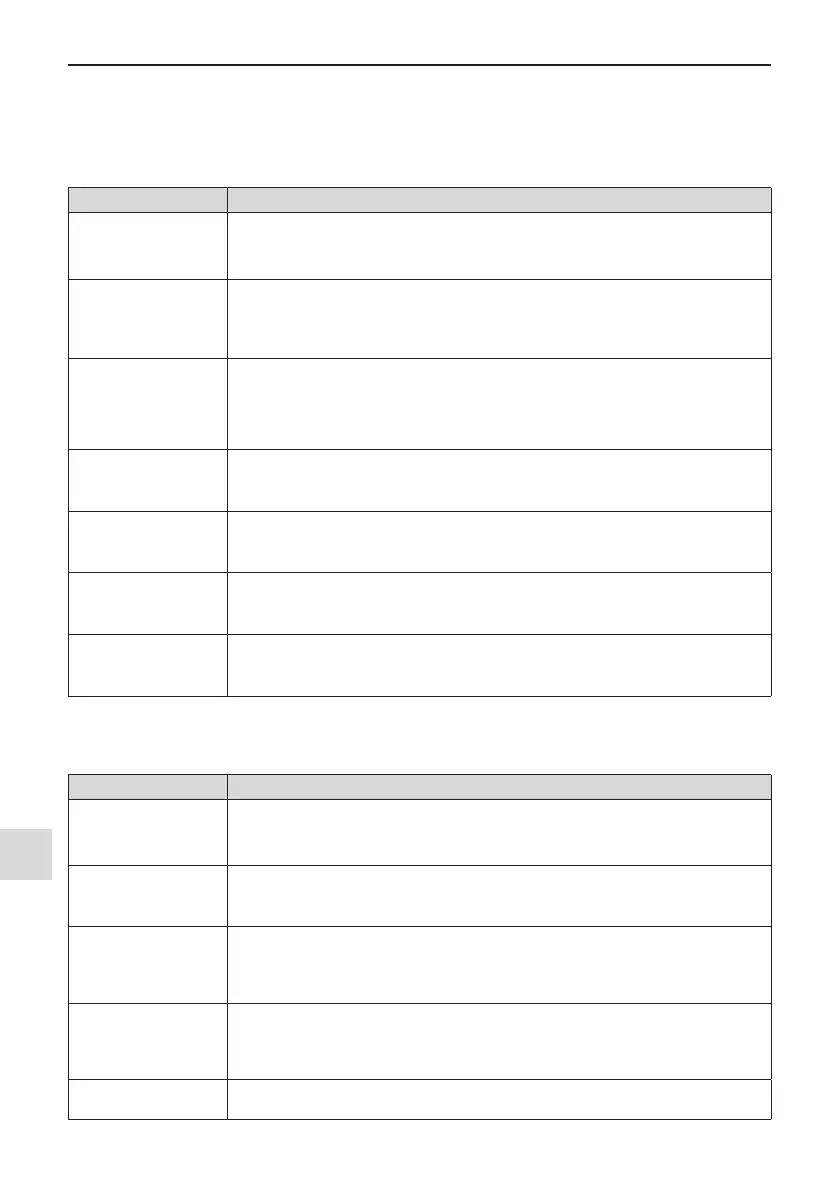
1. Drive in Open-loop Vector Control (F0-01 = 0: Default value)
The AC drive implements control of the motor speed and torque without an encoder for speed feedback. In this
control mode, auto-tuning is required for motor related parameters.
Problem Solutions
Overload or overcurrent
detected during motor
start
● Set motor parameters F1-01 to F1-05 according to motor nameplate.
● Select a proper motor auto-tuning mode by setting F1-37 and perform motor auto-tuning.
If possible, select dynamic auto-tuning.
Poor torque or speed
response and motor
oscillation at speeds
below 5 Hz
● If motor torque and speed response are too slow, increase the setting of F2-00 (speed
loop proportional gain) by 10 gradually or decrease the setting of F2-01 (speed loop
integral time) by 0.05 gradually.
● If motor oscillation occurs, decrease F2-00 and increase F2-01.
Poor torque or speed
response and motor
oscillation at speeds
above 5 Hz
● If motor torque and speed response are too slow, increase the setting of F2-03 (speed
loop proportional gain) by 10 gradually or decrease the setting of F2-04 (speed loop
integral time) by 0.05 gradually.
● If motor oscillation occurs, decrease F2-03 and increase F2-04.
Low speed accuracy
● If speed error when motor runs with load is large, increase the setting of F2-06 (vector
control slip compensation gain) by 10% gradually.
Obvious speed
uctuation
● If motor speed uctuation is large, increase the setting of F2-07 (speed lter time) by
0.001s gradually.
Too loud motor noise
● Increase the setting of F0-15 (carrier frequency) by 1.0 kHz gradually. Note that increase
in carrier frequency will result in an increase in the leakage current of the motor.
Insufcient motor torque
● Check whether torque upper limit is small. If yes, please: increase the setting of F2-10
(digital setting of torque upper limit in speed control mode) in the speed control mode;
increase the torque reference (A0-03) in the torque control mode.
2. Drive in Feedback Vector Control (F0-01 = 1)
It is applicable to the application with an encoder for speed feedback. In this mode, you need to set the encod-
er pulses per revolution, the encoder type and the encoder direction correctly.
Problem Solutions
Overload or overcurrent
fault detected during
motor start
● Set F1-27, F1-28 and F1-30 correctly.
Overload or overcurrent
detected during motor
running
● Set motor parameters F1-01 to F1-05 according to motor nameplate.
● Select a proper motor auto-tuning mode by setting F1-37 and perform motor auto-tuning.
If possible, select dynamic auto-tuning.
Poor torque or speed
response and motor
oscillation at speeds
below 5 Hz
● If motor torque and speed response are too slow, increase the setting of F2-00 (speed
loop proportional gain) by 10 gradually or decrease the setting of F2-01 (speed loop
integral time) by 0.05 gradually.
● If motor oscillation occurs, decrease F2-00 and increase F2-01.
Poor torque or speed
response and motor
oscillation at speeds
above 5 Hz
● If motor torque and speed response are too slow, increase the setting of F2-03 (speed
loop proportional gain) by 10 gradually or decrease the setting of F2-04 (speed loop
integral time) by 0.05 gradually.
● If motor oscillation occurs, decrease F2-03 and increase F2-04.
Obvious speed
uctuation
● If motor speed uctuation is large, increase the setting of F2-07 (speed lter time) by
0.001s gradually.

 Loading...
Loading...