OPERATOR’S MANUAL
series Robot Controller
5.2.13 Move to Teach Point [M–TO]
(1) Function
Moves the robot to a position of the positional data indicated by the main cursor
by synchronous operation.
(2) Procedures
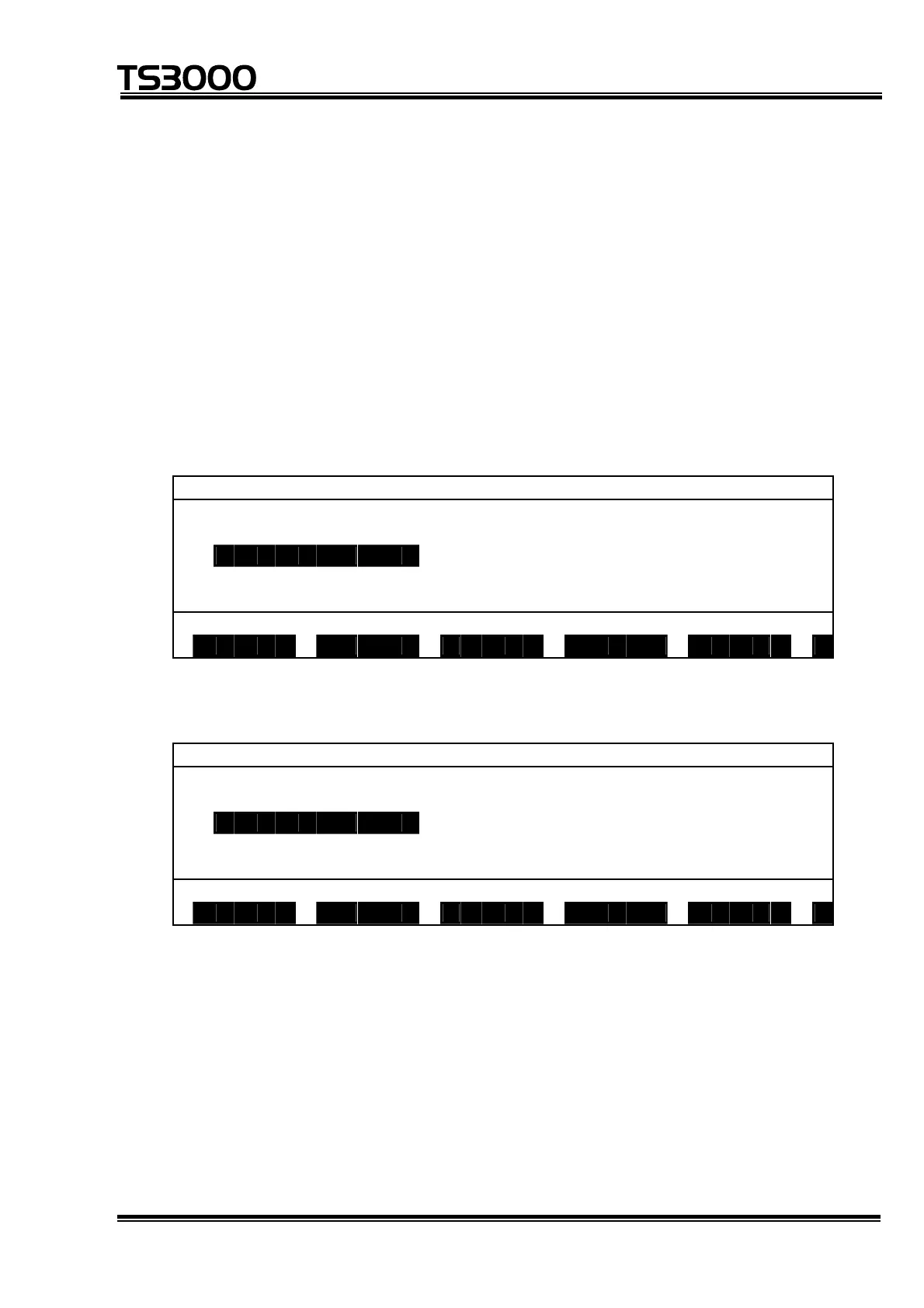
Assume that you are going to move the robot to the position of "POINT00005."
(a) Step 1: Command selection.
Move the main cursor to "POINT00005" and press the NEXT key repeatedly
until [M–TO] is displayed in the command menu.
P O I N T X Y Z
↑
P O I N T 0 0 0 0 3 = 1 0 0 , 1 0 0 , 1 0 0 ,
P O I N T 0 0 0 0 4 = 2 0 0 , 2 0 0 , 2 0 0 ,
P O I N T 0 0 0 0 5 = 300 , 300 , 3 00 ,
P O I N T 0 0 0 0 6 = 4 0 0 , 4 0 0 , 4 0 0 ,
↓
P O I N T 0 0 0 0 7 = 5 0 0 , 5 0 0 , 5 0 0 ,
P O I N T 0 0 0 0 5 w / . w o r l d
< N O S A V F I N D T E A C H M - T O C U T >
Press [M–TO].
P O I N T X Y Z
↑
P O I N T 0 0 0 0 3 = 1 0 0 , 1 0 0 , 1 0 0 ,
P O I N T 0 0 0 0 4 = 2 0 0 , 2 0 0 , 2 0 0 ,
P O I N T 0 0 0 0 5 = 300 , 300 , 3 00 ,
P O I N T 0 0 0 0 6 = 4 0 0 , 4 0 0 , 4 0 0 ,
↓
P O I N T 0 0 0 0 7 = 5 0 0 , 5 0 0 , 5 0 0 ,
M O V I N G T O P O I N T
(b) Step 2: Command execution.
Press the MOVE key while pressing the enable switch, and the robot moves
to the teach point in synchronism. When the robot has reached the teach
point, the system returns to the previous display.
STE 80720
– 5-29 –

 Loading...
Loading...






