OPERATOR’S MANUAL
series Robot Controller
5.4.4 Call of Load Data Directory Display [PYLD]
(1) Function
Calls the load data directory display.
(2) Procedures
(a) Step 1: Command selection.
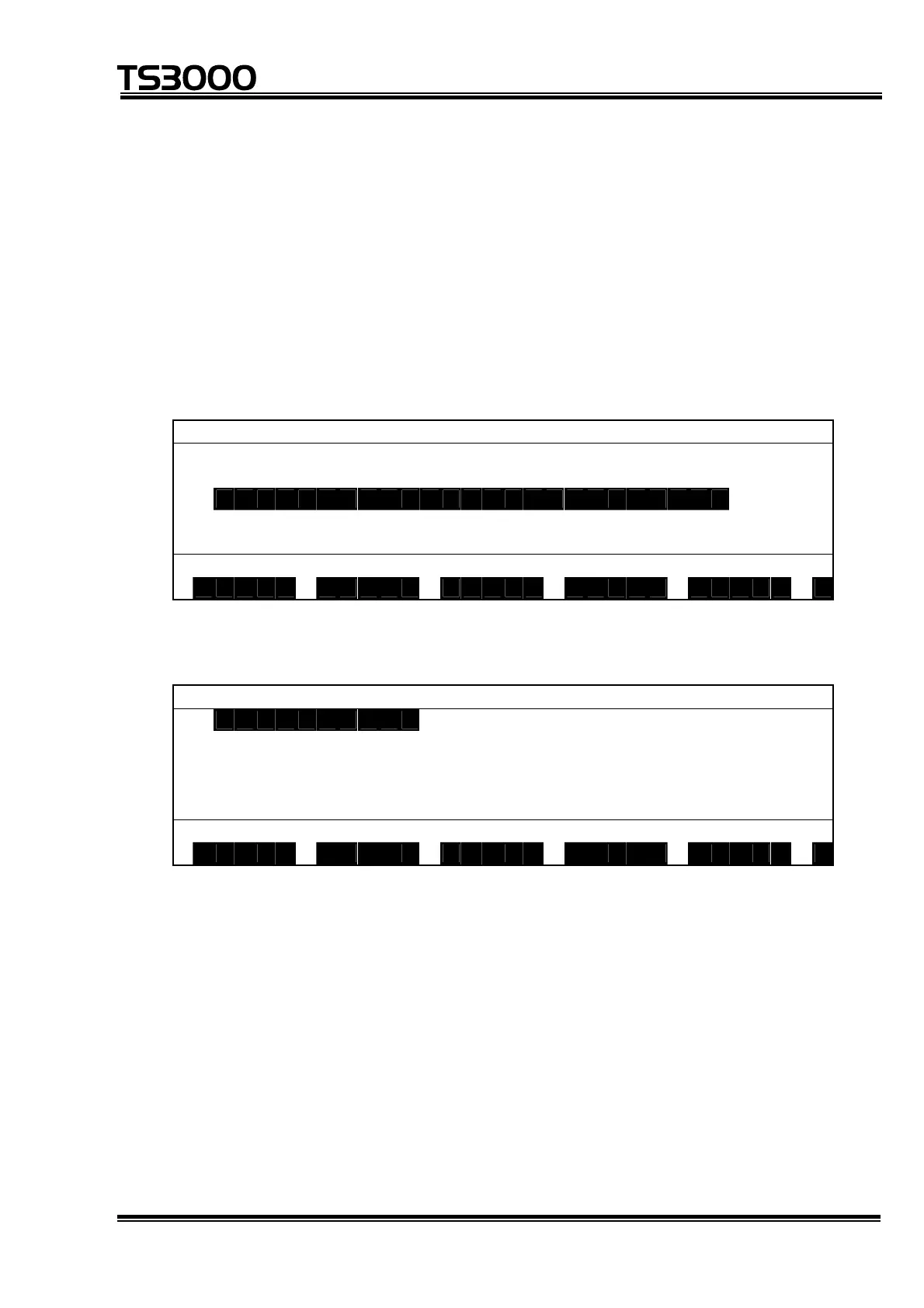
Select the data display mode as shown below (i.e., the cursor is not present
on the command line).
T R A N S S E L E C T I O N [ 3 / 1 1 ]
. w o r l d 1 0
w T R A N S 0 0 0 0 1 0
T R A N S 0 0 0 0 2 5
t T R A N S 0 0 0 0 3 0
↓
T R A N S 0 0 0 0 4 4
T R A N S 0 0 0 0 2
S A V E P R G P Y L D W O R K T O O L >
Press [PYLD], and the following load data directory display appears.
L O A D W E I G H T O F F S E T
L O A D 0 0 0 0 0 1 = 100 . 000 , 1 0 0 . 000
L O A D 0 0 0 0 0 2 = 1 0 . 0 0 0 , 0 . 0 0 0
L O A D 0 0 0 0 0 3 = 100 . 000 , 0 . 000
L O A D 0 0 0 0 0 4 = 2 0 0 . 0 0 0 , 0 . 0 0 0
↓
L O A D 0 0 0 0 0 5 = 5 0 . 0 0 0 , 0 . 0 0 0
L O A D 0 0 0 0 0 3
S A V E P R G P O I N T T R A N S F I N D >
(3) Caution
On the load data directory display, the main cursor indicates the position of the
data displayed before. At initial display, the data are displayed from the
beginning.
For details of operations to be done on the load data display, see Para. 5.6.
STE 80720
– 5-56 –

 Loading...
Loading...






