13.6 Installation → TCP Configuration
13.6 Installation → TCP Configuration
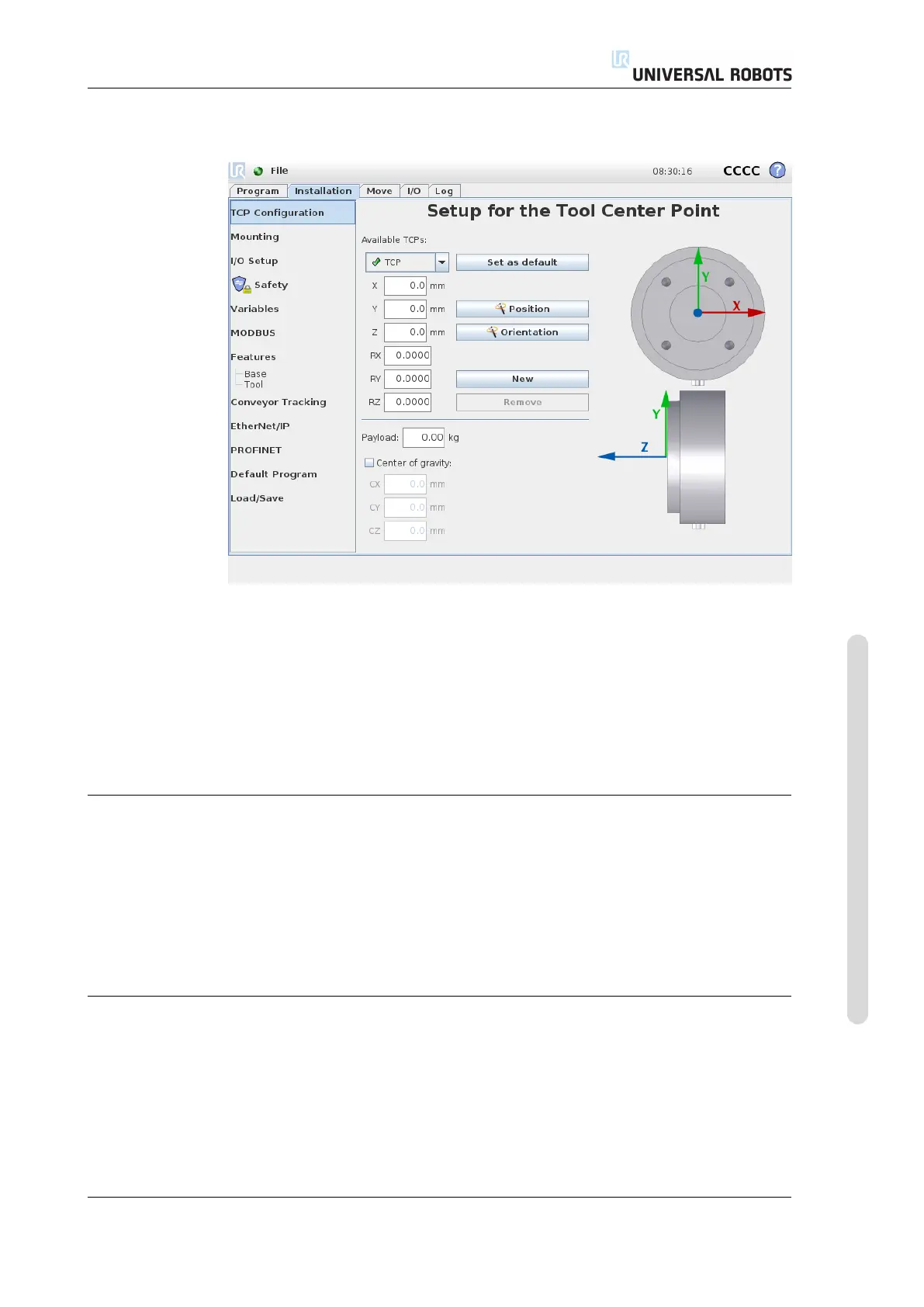
A Tool Center Point (TCP) is a characteristic point on the robot’s tool. Several named
TCPs can be defined on this screen. Each TCP contains a translation and a rotation
relative to the center of the tool output flange, as indicated on the on-screen graph-
ics. The position coordinates, X, Y and Z, specify the position of the TCP, while RX,
RY and RZ specify its orientation. When all of the specified values are zero, the TCP
coincides with the center point on the tool output flange and adopts the coordinate
system depicted on the right side of the screen.
13.6.1 Adding, modifying and removing TCPs
To define a new TCP, hit the New button. The created TCP then automatically re-
ceives a unique name and becomes selected in the drop-down menu.
The translation and rotation of the selected TCP can be modified by tapping the
respective white text fields and entering new values.
To remove the selected TCP, simply tap the Remove button. The last remaining
TCP cannot be deleted.
13.6.2 The default and the active TCP
Precisely one of the configured TCPs is the default one. The default TCP is marked
by a green icon to the left of its name in the drop-down TCP menu. To set the
currently selected TCP as the default one, hit the Set as default button.
One TCP offset is always used as the active one to determine all linear motions in
Cartesian space. Also, it is the motion of the active TCP that is visualized on the
Graphics tab (see 14.29). Before any program is run, as well as before the start of
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-41 CB3

 Loading...
Loading...









