17.5 EUROMAP 12 to EUROMAP 67 conversion
CAUTION:
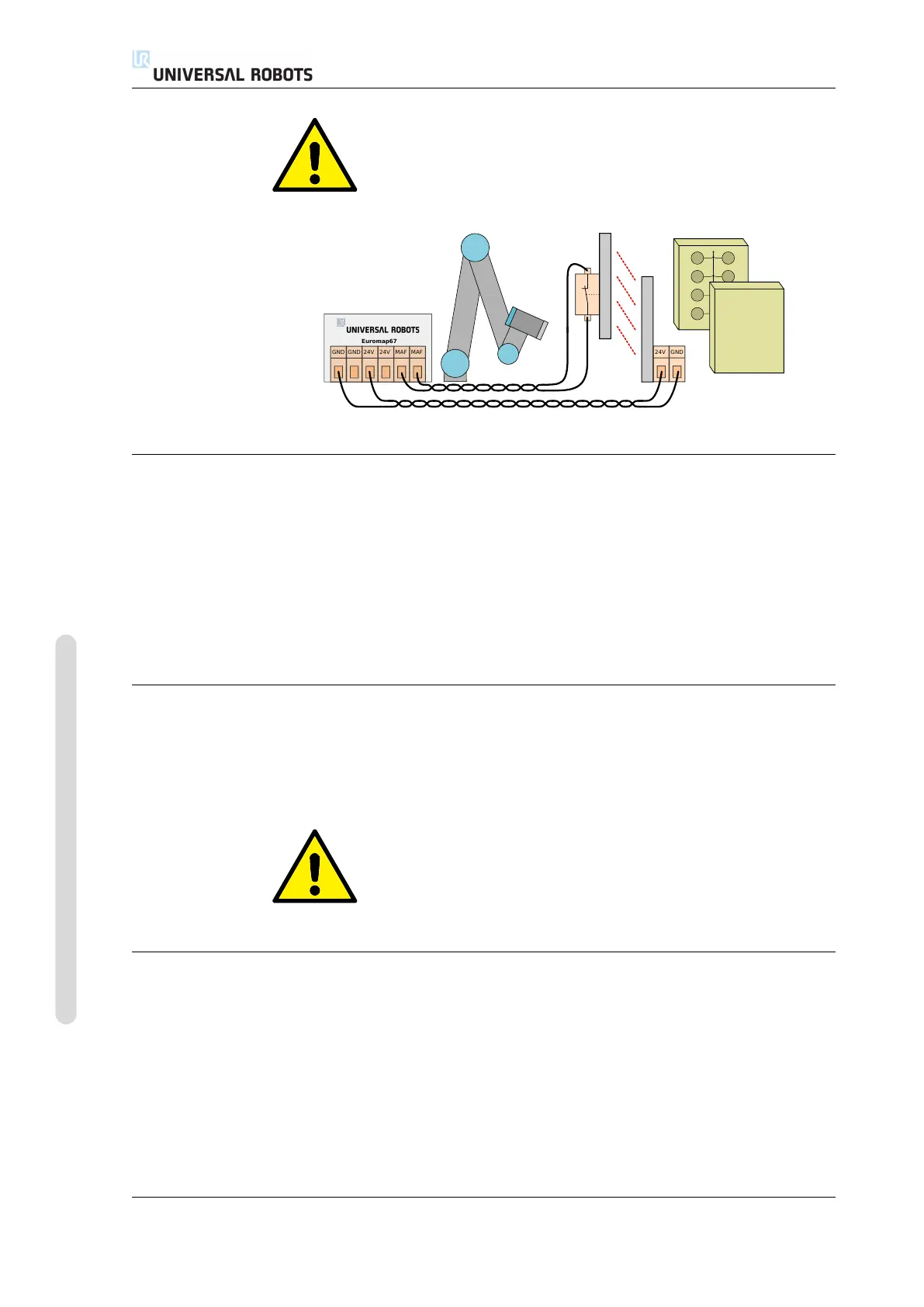
If you do not install a light curtain you may damage both the robot
and the mould.
24V GND
GND GND
24V 24V
MAF MAF
Euromap67
17.3 Mounting the robot and tool
Before constructing a tool and a mounting surface, the integrator must consider
how joint 4 (wrist 2) is orientated during pick and place. Joint 1, 2 and 3 has parallel
axes and if joint 4 orientates joint 5 to the left or to the right then joint 5 is parallel to
the other three axes, which forms a singularity. It is generally a good idea to place
the robot in a 45 degree angle or constructing a tool where the surface of the tool
flange of the robot points down when gripping the items from the vertical mould
surface.
17.4 Using the robot without an IMM
To operate the robot without an IMM, a by-pass plug must be used to close the
emergency and safety signals. The only alternative is to permanently uninstall the
interface as described in 19.1.
DANGER:
Never use the by-pass plug when the robot is installed together
with an IMM.
17.5 EUROMAP 12 to EUROMAP 67 conversion
To interface an IMM with EUROMAP 12 interface an E12 - E67 adaptor must be
used. Several adaptors is available on the marked from different manufacturers.
Unfortunately most adaptors are constructed for specific robots or IMMs assuming
specific designs choices. This means that some adaptors will not connect the UR
robot and your IMM correctly. It is recommended to read both the EUROMAP 12
and EUROMAP 67 standard whenever using or constructing an adaptor.
A list with common errors is shown below:
CB3 III-8 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.

 Loading...
Loading...









