10.11 Joint Limits
(see 10.4). Note that the minus sign displayed with the tolerance value is only there
to indicate that the tolerance is subtracted from the actual entered value. The safety
system performs a Stop Category 0, should the robot arm exceed the limit (without
tolerance).
WARNING:
The speed limit is imposed only on the robot TCP, so other parts of
the robot arm may move faster than the defined value.
Switching to Basic Settings Pressing the Basic Settings... button switches
back to the basic general limits screen and all general limits are reset to their Default
preset. Should this cause any customized values to be lost, a popup dialog is shown
to confirm the action.
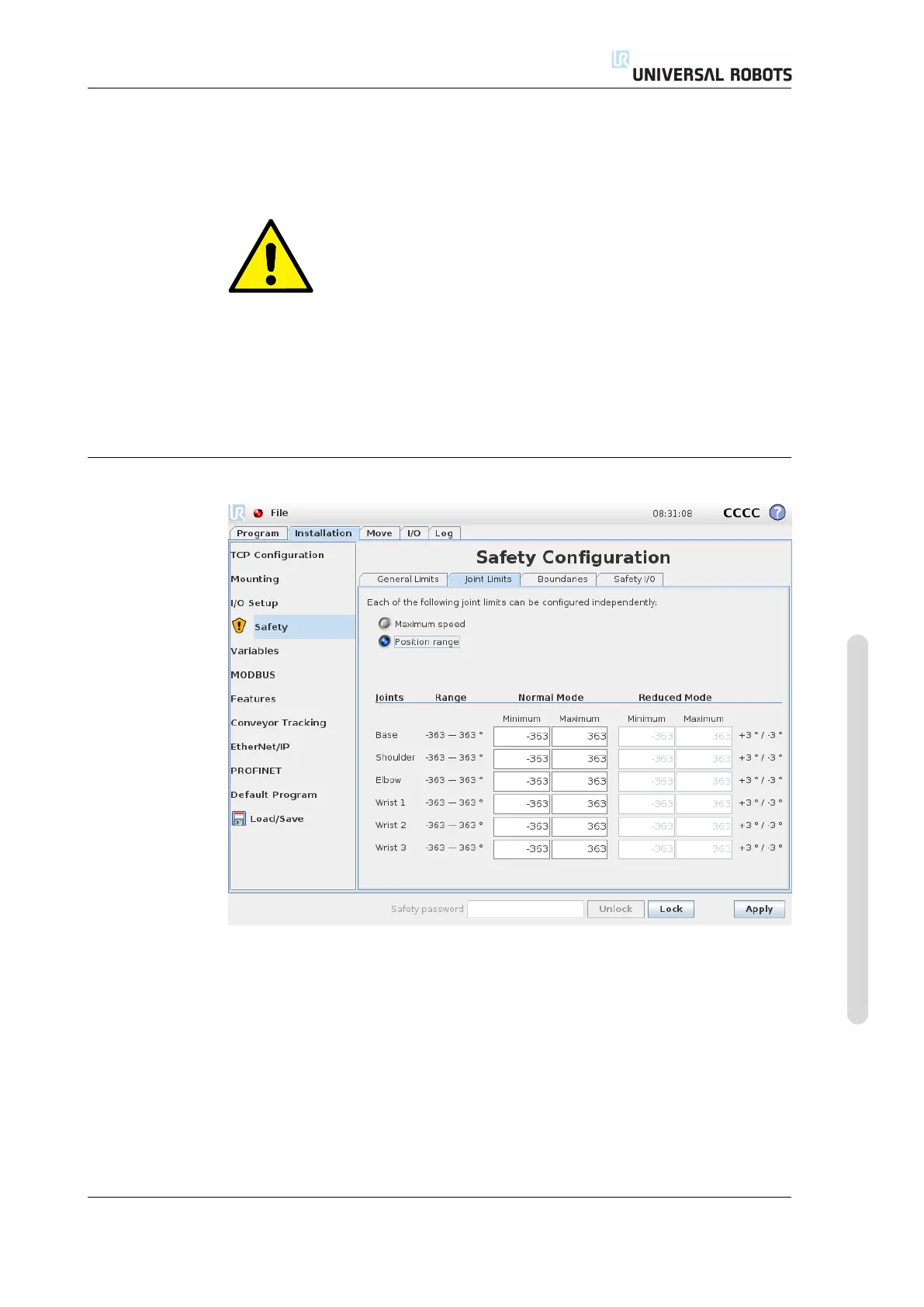
10.11 Joint Limits
Joint limits restrict the movement of individual joints in joint space, i.e. they do not
refer to Cartesian space but rather to the internal (rotational) position of the joints
and their rotational speed. The radio buttons in the upper portion of the subpanel
make it possible to independently set up Maximum Speed and Position Range
for the joints.
When in Freedrive mode (see 13.1.5), and the current position or speed of a joint is
close to the limit, the user will feel a repelling force which increases in magnitude
as the joint approaches the limit. The force is generated when joint speed is within
approximately 20
◦
/s of the speed limit or joint position is within approximately 8
◦
of the position limit.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-11 CB3

 Loading...
Loading...









