14.25 Command: Pallet
14.25 Command: Pallet
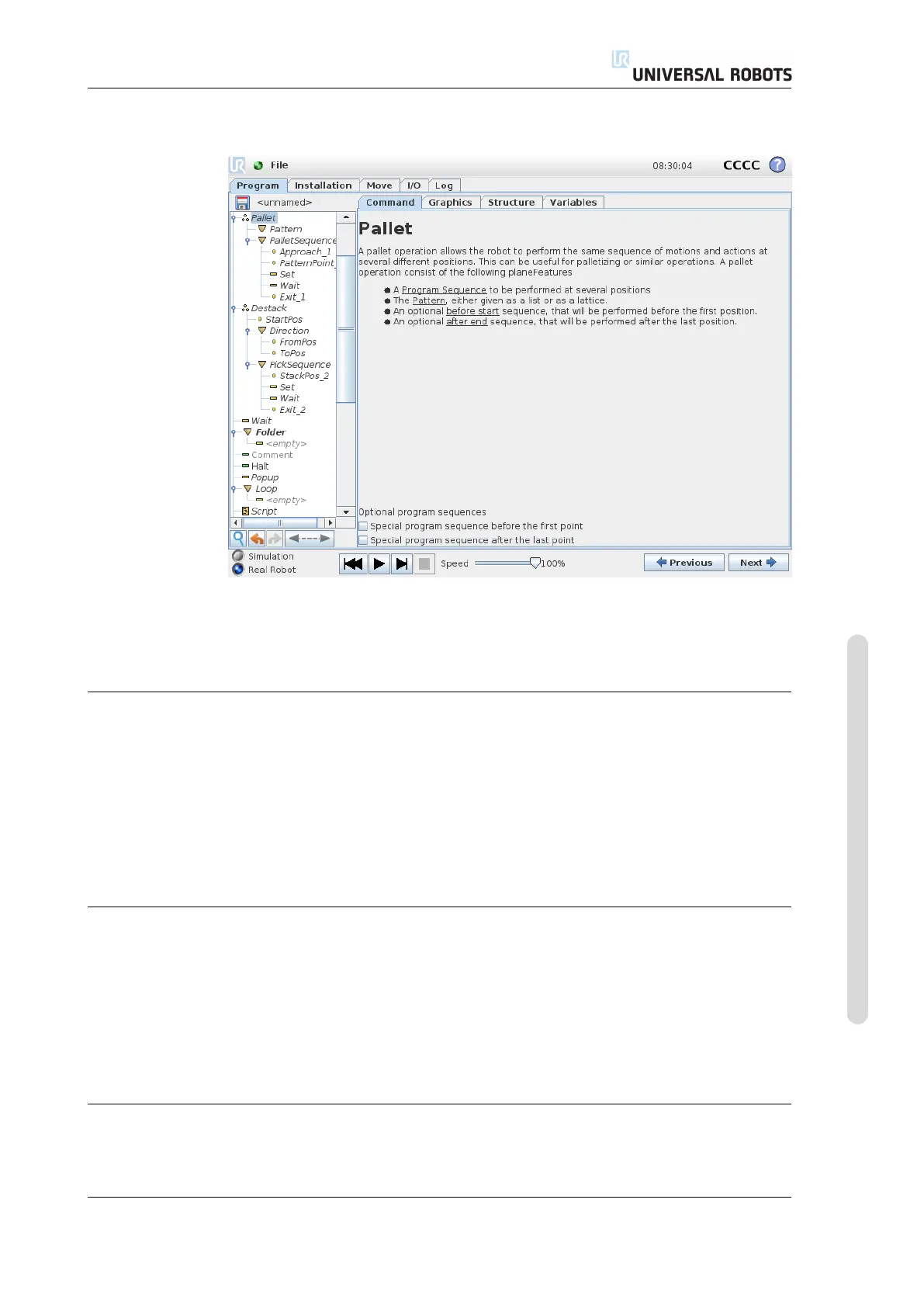
A pallet operation can perform a sequence of motions in a set of places given as a
pattern, as described in 14.23. At each of the positions in the pattern, the sequence
of motions will be run relative to the pattern position.
Programming a Pallet Operation
The steps to go through are as follows;
1. Define the pattern.
2. Make a “PalletSequence” for picking up/placing at each single point. The
sequence describes what should be done at each pattern position.
3. Use the selector on the sequence command screen to define which of the way-
points in the sequence should correspond to the pattern positions.
Pallet Sequence/Anchorable Sequence
In an Pallet Sequence node, the motions of the robot arm are relative to the pallet
position. The behavior of a sequence is such that the robot arm will be at the po-
sition specified by the pattern at the Anchor Position/Pattern Point. The
remaining positions will all be moved to make this fit.
Do not use the Move command inside a sequence, as it will not be relative to the
anchor position.
“BeforeStart”
The optional BeforeStart sequence is run just before the operation starts. This
can be used to wait for ready signals.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-95 CB3