13.12 Installation → Features
• Slave Address: This text field can be used to set a specific slave address for
the requests corresponding to a specific signal. The value must be in the range
0-255 both included, and the default is 255. If you change this value, it is
recommended to consult the manual of the remote MODBUS device to verify
its functionality when changing slave address.
• Reconnect count: Number of times TCP connection was closed, and con-
nected again.
• Connection status: TCP connection status.
• Response time [ms]: Time between modbus request sent, and response re-
ceived - this is updated only when communication is active.
• Modbus packet errors: Number of received packets that contained errors (i.e.
invalid lenght, missing data, TCP socket error).
• Timeouts: Number of modbus requests that didn’t get response.
• Requests failed: Number of packets that could not be sent due to invalid
socket status.
• Actual freq.: The average frequency of client (master) signal status updates.
This value is recalculated each time the signal receives a response from the
server (or slave).
All counters count up to 65535, and then wrap back to 0.
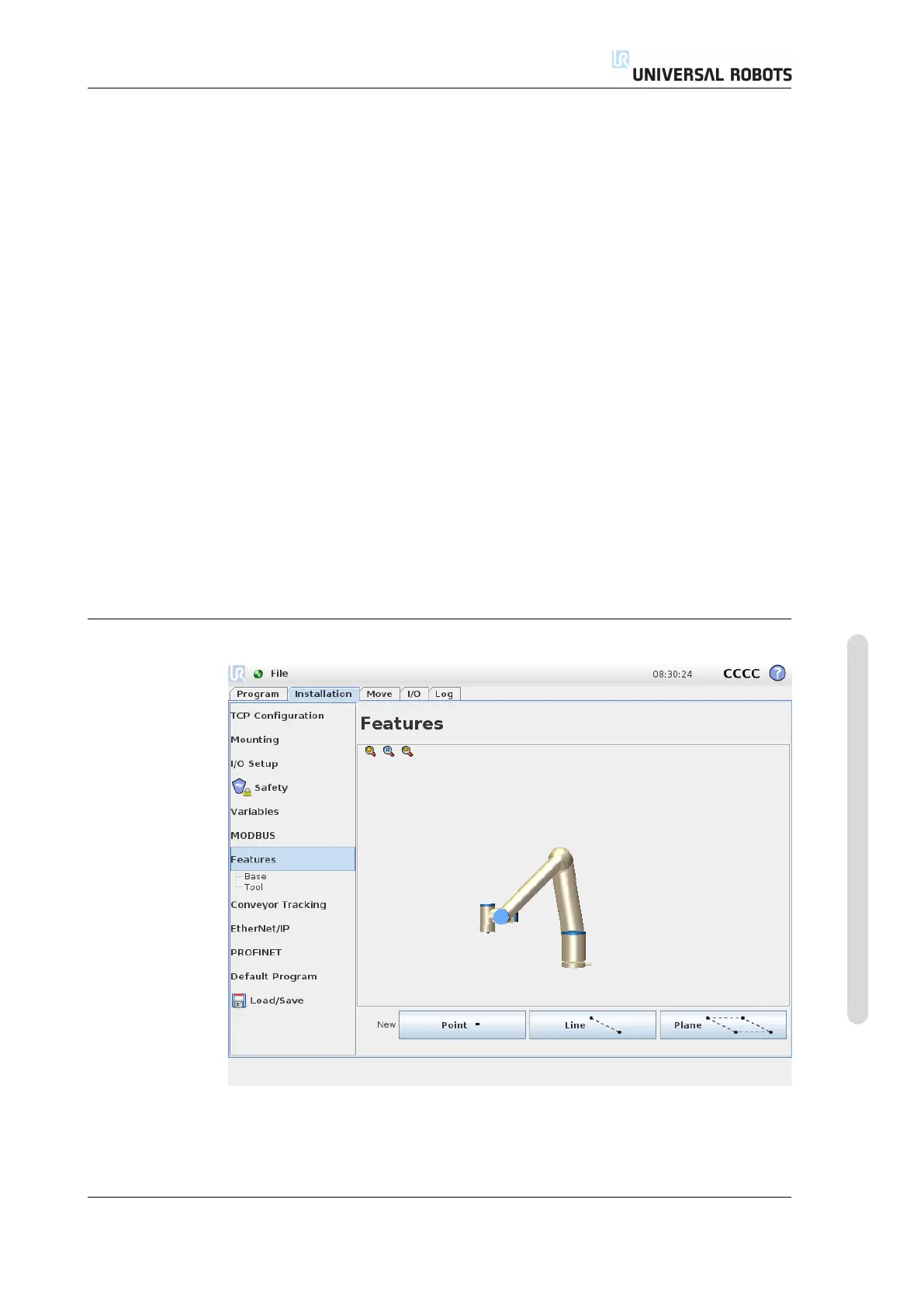
13.12 Installation → Features
It is a common scenario that sub parts of a robot program consist of movements
that must be executed relative to specific objects other than the base of the robot
arm. These objects could be tables, other machines, workpieces, conveyors, pallets,
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-51 CB3

 Loading...
Loading...









