13.11 Installation → MODBUS client I/O Setup
options to resolve the issue: either use the installation variables of the same name
instead of the program variable or have the conflicting variables renamed automat-
ically.
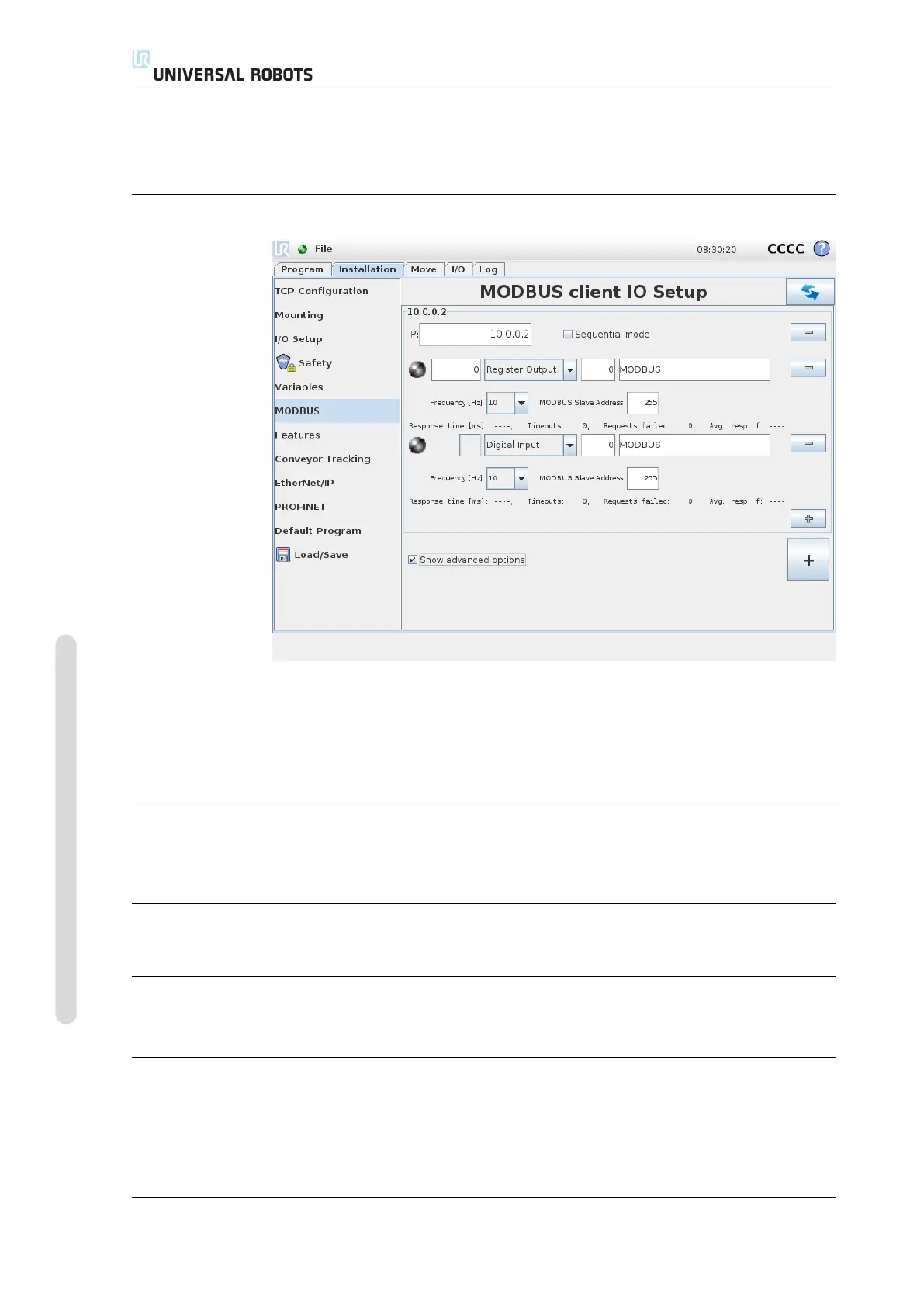
13.11 Installation → MODBUS client I/O Setup
Here, the MODBUS client (master) signals can be set up. Connections to MOD-
BUS servers (or slaves) on specified IP addresses can be created with input/output
signals (registers or digital). Each signal has a unique name so it can be used in
programs.
Refresh
Push this button to refresh all MODBUS connections. Refreshing disconnects all
modbus units, and connects them back again. All statistics are cleared.
Add unit
Push this button to add a new MODBUS unit.
Delete unit
Push this button to delete the MODBUS unit and all signals on that unit.
Set unit IP
Here the IP address of the MODBUS unit is shown. Press the button to change it.
CB3 II-48 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.

 Loading...
Loading...









