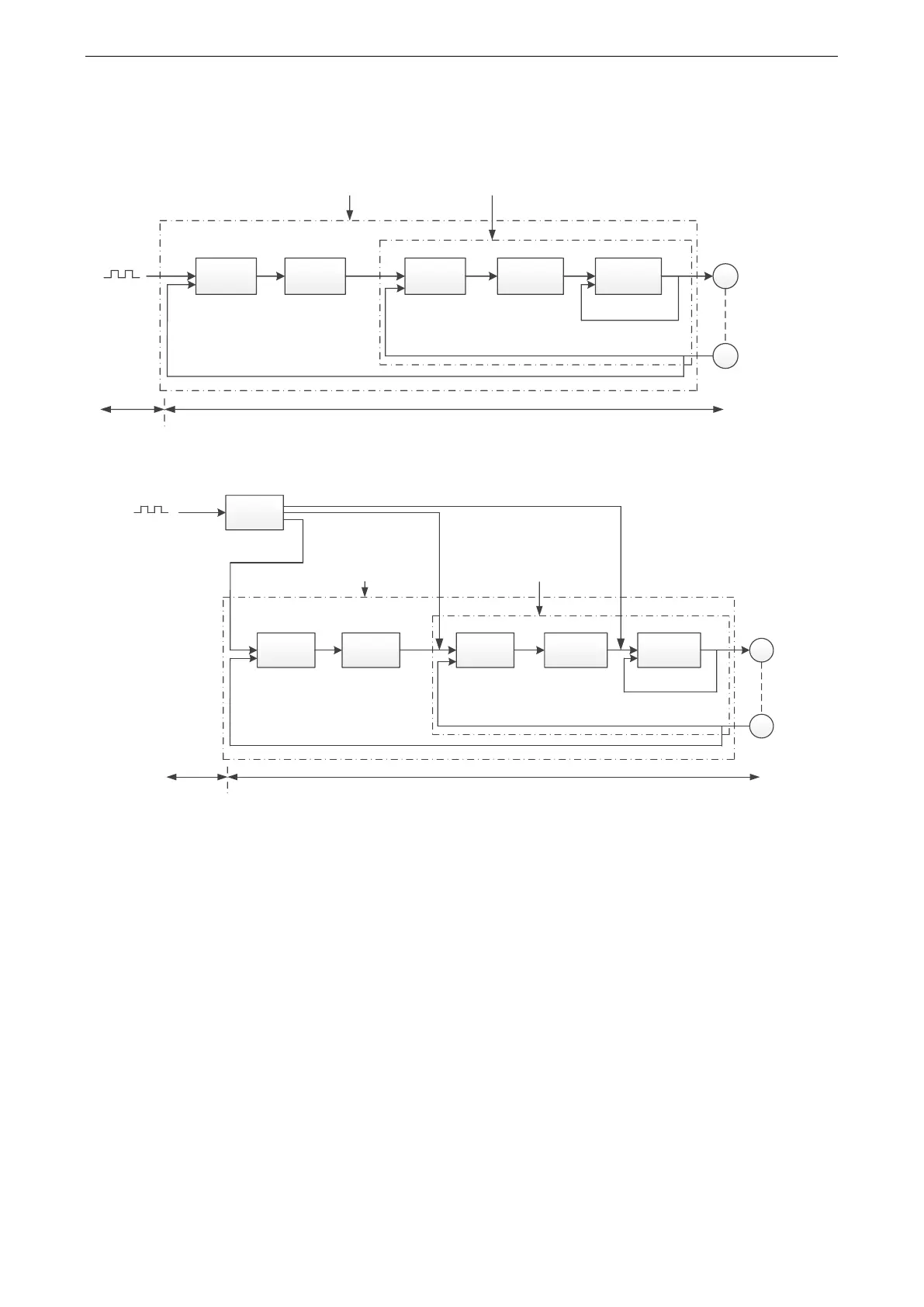
Position control loop diagram (turn on the model loop)
Servo unit consists of three feedback loops (current loop, speed loop and position loop) from inside to outside.
The more inner loop, the more responsive it is. Failure to comply with this principle will result in poor response or
vibration. Among them, the current loop parameters are fixed values to ensure adequate responsiveness, and users
do not need to adjust.
Please use manual adjustment in the following occasions:
• When the expected effect can not be achieved by fast adjusting the gain
• When the expected effect is not achieved by automatically adjusting the gain
5.5.2 Adjustment steps
In position mode, if the soft mode (P2-02.0=1) is selected by auto-tuning, the function of model loop will be
turned off; in speed mode, the gain of position loop will be invalid.
Increasing response time
1. Reducing the filter time constant of torque instruction (P2-35)
2. Increasing Speed Loop Gain (P1-00)
 Loading...
Loading...

