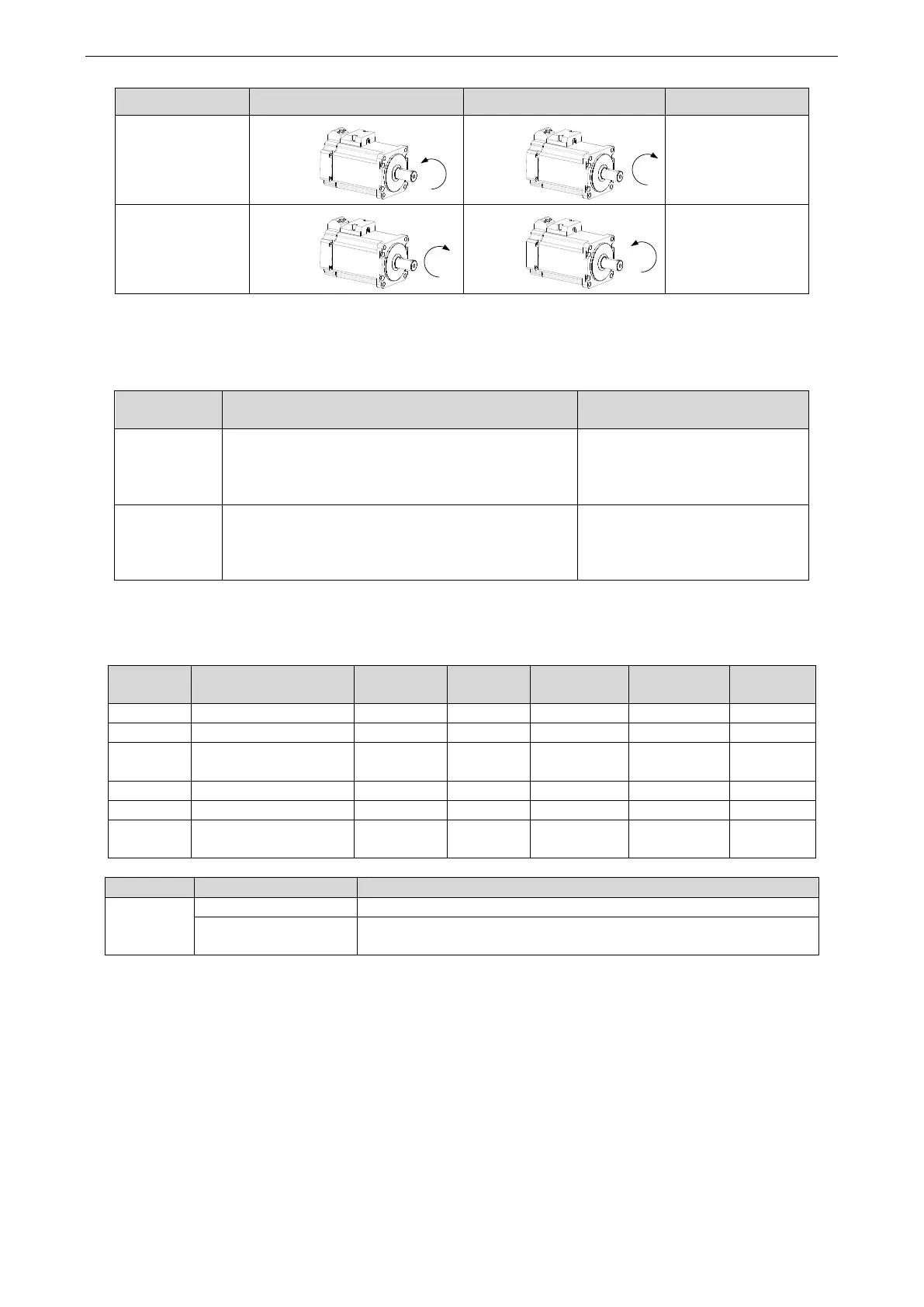
The servo driver is not enabled, the servo motor is
not powered, and free deceleration to 0. The
deceleration time is affected by mechanical inertia,
equipment friction, etc.
The servo driver outputs the
reverse braking torque, and the
motor decelerates rapidly to 0.
Advantages: smooth deceleration, small
mechanical impact, small mechanical impact
Disadvantage: slow deceleration process
According to different scenarios of servo shutdown, it can be divided into servo off shutdown, alarm shutdown
and over travel shutdown.
(1) Servo OFF and alarm shutdown
◼ Related parameter
Note:
(1) P0-27 / P0-29 = 0, inertia stops, and maintains inertia operation state after stopping.
When the servo is off and the alarm occurs, the motor starts to stop by inertia until the speed is less than P5-03,
and then it turns to free stop. The servo will time the inertia stop process. In the process of inertia stop, if the
timing time has been greater than P0-30, and the motor speed has not dropped below P5-03, the servo will directly
free stop, and give the stop timeout alarm E-262.
(2) P0-27 / P0-29 = 2, deceleration braking stops, and maintains inertia operation state after stopping.
When servo off and alarm occur, the motor will generate a braking torque of P3-32. The motor will start braking
and stop until the speed is less than P5-03 (rotation detection speed), and then it will turn to free stop. At the same
time, the servo will timing the braking stop process. In the process of inertia stop, if the timing time has been
greater than P0-30, and the motor speed has not dropped below P5-03, the servo will directly free stop, and give
the stop timeout alarm E-262.
(3) The so terminal of servo driver is equipped with holding brake function. No matter P0-27 / P0-29 = 0 or 2, it
 Loading...
Loading...

