Note: the setting made here is the time when TGON of rotation detection is invalid when the motor is stopped.
② Abnormal state holding brake timing
When the alarm/power supply interruption occurs, the motor quickly becomes non energized. During the time
from gravity or inertia to the brake action, the machine will move. To avoid this,
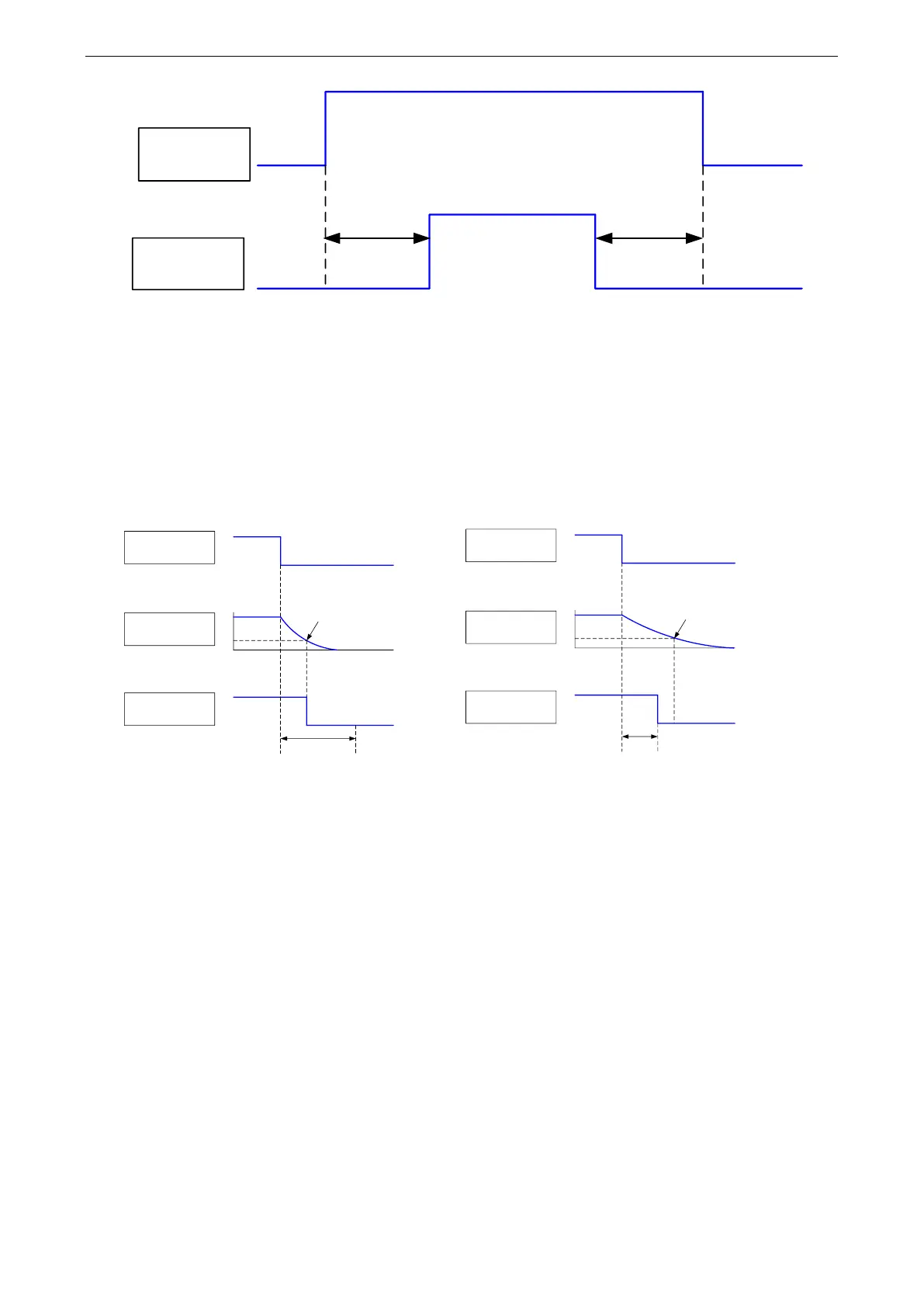
The conditions for the /BK signal to turn from on to off in the motor rotation are as follows (any of the two
conditions will take effect):
1) After the servo is off, the motor speed is below the set value of P5-08;
2) After the servo is off, when the set time of P5-09 is exceeded.
The sequence diagram is as follows:
Since the brake of the servo motor is designed for position holding, it must be enabled at the right time when the
motor stops. While observing the action of the machine, adjust the user parameters.
4.2.6 Braking setting
When the servo motor is driven by the generator mode, the power returns to the servo amplifier side, which is
called regenerative power. Regenerative power is absorbed by charging the smoothing capacitor in the servo
amplifier. After exceeding the rechargeable energy, the regenerative resistance is used to consume the
regenerative power.
The servo motor is driven by regeneration (generator) mode as follows:
➢ Deceleration stop period during acceleration and deceleration operation;
➢ When the vertical axis is running downward;
➢ When the external load drives the motor to rotate.
 Loading...
Loading...

