Signal/C-SEL terminal input
status
Signal /C-SEL terminal
logic
No need external terminal
input
The control mode set by
P0-01
The control modes supported by
DF3E are detailed in Chapter 4.1.1
SI□ terminal no signal input
SI□ terminal has low
voltage input
The control mode set by
P0-02
The control modes supported by
DF3E are detailed in Chapter 4.1.1
SI□ terminal has high
voltage input
SI□ terminal no signal input
4.2 Basic function setting
4.2.1 Jog operation
Inching operation needs to be completed after the power supply is connected and before the online commissioning
operation. Its purpose is to ensure that the servo system can operate normally without abnormal vibration,
abnormal sound and other problems. Inching operation can be carried out by panel group F parameters or our
upper computer debugging software xinje servo tuner.
Inching operation can be divided into two modes: inching operation and trial operation. Inching operation is
closed-loop control, trial operation is open-loop control, and general steps are trial operation first, and then
inching operation. Both operations can take effect only when the servo is not enabled.
◼ Related parameter
P3-18 is the speed for closed-loop inching operation, which only takes effect in two inching modes, and the rest
normal control modes are invalid.
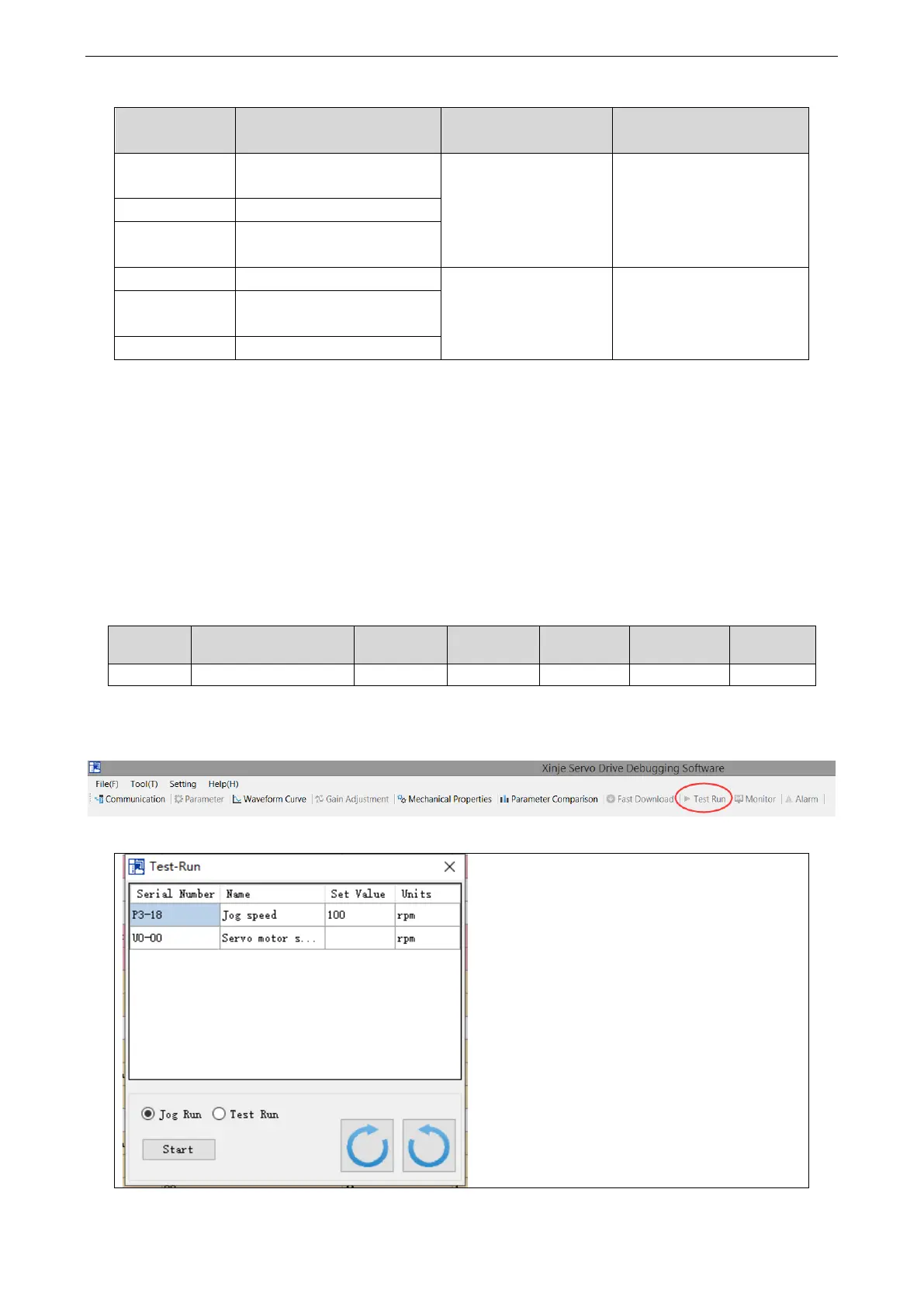
Jog operation through XinjeServo Tuner software:
Click test run button in the menu to show below interface:
P3-18: jog speed
Jog Run: closed-loop jog operation
Test Run: open loop jog operation
Start: enable in jog mode
Forward/Reverse: Jog forward or reverse
 Loading...
Loading...

