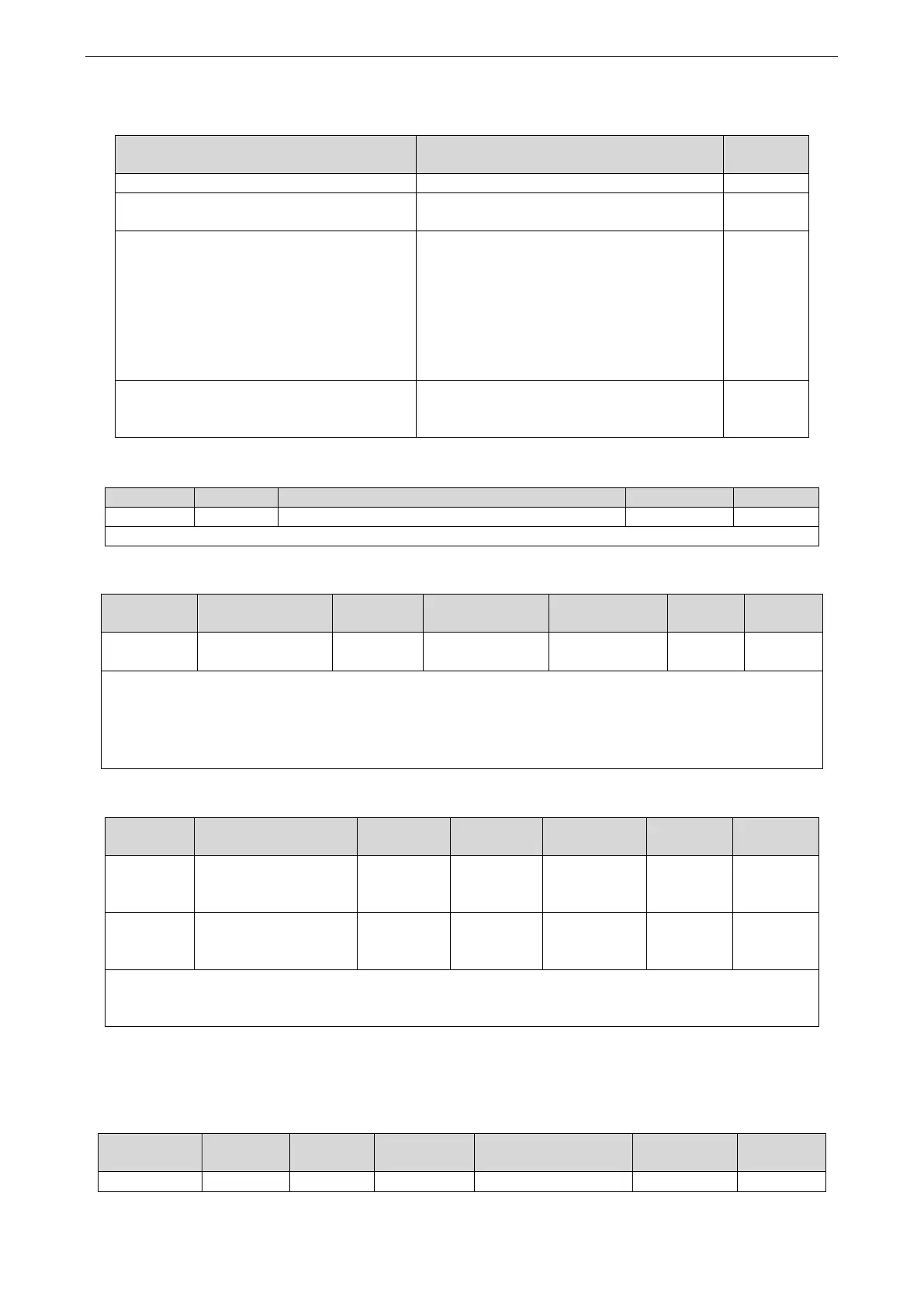
P0-01 Control mode selection
Set to 1: internal torque mode
P3-33 Internal torque command
The given value is the percentage of rated
torque
P3-16 Internal forward speed limit of
torque control
P3-17 Internal reverse speed limit of
torque control
P3-14 Forward max speed limit (MAX
speed)
P3-15 Reverse max speed limit (MAX
speed)
Speed limit in torque mode
P5-27 Speed direction switch /SPD-D
Change the direction, default is n.0000
If it is given through SI2 terminal, P5-27
can be set to n.0002
4.5.1 Torque control (internal setting)
Torque control: internal setting
Function: Control the torque by internal torque command.
4.5.1.1 Internal torque command
The unit of this parameter is 1% of the rated torque.
For example: P3-33=50, motor forward run with 50% of the rated torque;
P3-33= -20, motor reverse run with 20% of the rated torque.
In addition to using the torque to control the direction of servo operation, it can also use / SPD-D to control
the direction.
4.5.1.2 Internal speed limit of torque control
internal forward
speed limit in torque
control mode
internal reverse speed
limit in torque control
mode
Note: Even if the setting speed of this parameter is greater than the speed limit of P3-14, the actual
effective speed limit is the lower speed limit. (The maximum speed is the smaller value in P3-14/P3-15
and P3-16/P3-17)
4.5.1.3 Speed reach signal output (/VLT)
In torque mode, when the absolute value of the actual speed of the servo motor exceeds the speed limit value,
it is considered that the actual speed of the servo motor is limited. At this time, the servo driver can output
/VLT signal. Otherwise, if any condition is not met, the speed limit signal is invalid.
 Loading...
Loading...

