By default, no terminal is allocated, the parameter range is 0000-0014, and is allocated to the output
interface through parameter P5-43. When set to 0002, the signal is output from the SO2 terminal.
/VLT signal is only valid in torque mode.
4.6 Bus control
CANopen is a high level protocol based on CAN (control LAN network) serial bus system and CAL (CAN
application layer). CANopen assumes that the hardware of the connected devices has a CAN transceiver and a
CAN controller which conform to ISO11898 standard.
CANopen communication protocol CiA DS-301 includes periodic and event driven communication, which can
not only reduce the bus load to a minimum level, but also ensure a very short response time. It can achieve higher
communication performance at lower baud rate, thus reducing the electromagnetic compatibility problem and
reducing the cable cost.
CANopen device protocol defines the mechanism of direct access to servo parameters and time critical process
data communication.
4.6.1 Object dictionary region assignment
CANopen communication mainly realizes the control of various parameters of servo motor through several
operation modes, and realizes some other auxiliary functions. For more information, please refer to the CAN
literature of the automation International Association of users and manufacturers (www.can-cia.de ).
CAL provides all network management services and message delivery protocols, but does not define the content
of the object or the type of object being communicated (it only defines how, and does not define what), which is
the entry point of CANopen.
CANopen is developed on the basis of CAL, which uses a subset of CAL communication and service protocols,
and provides a realization scheme of distributed control system. CANopen can ensure the interoperability of
network nodes, and allow the function of nodes to be expanded randomly: simple or complex.
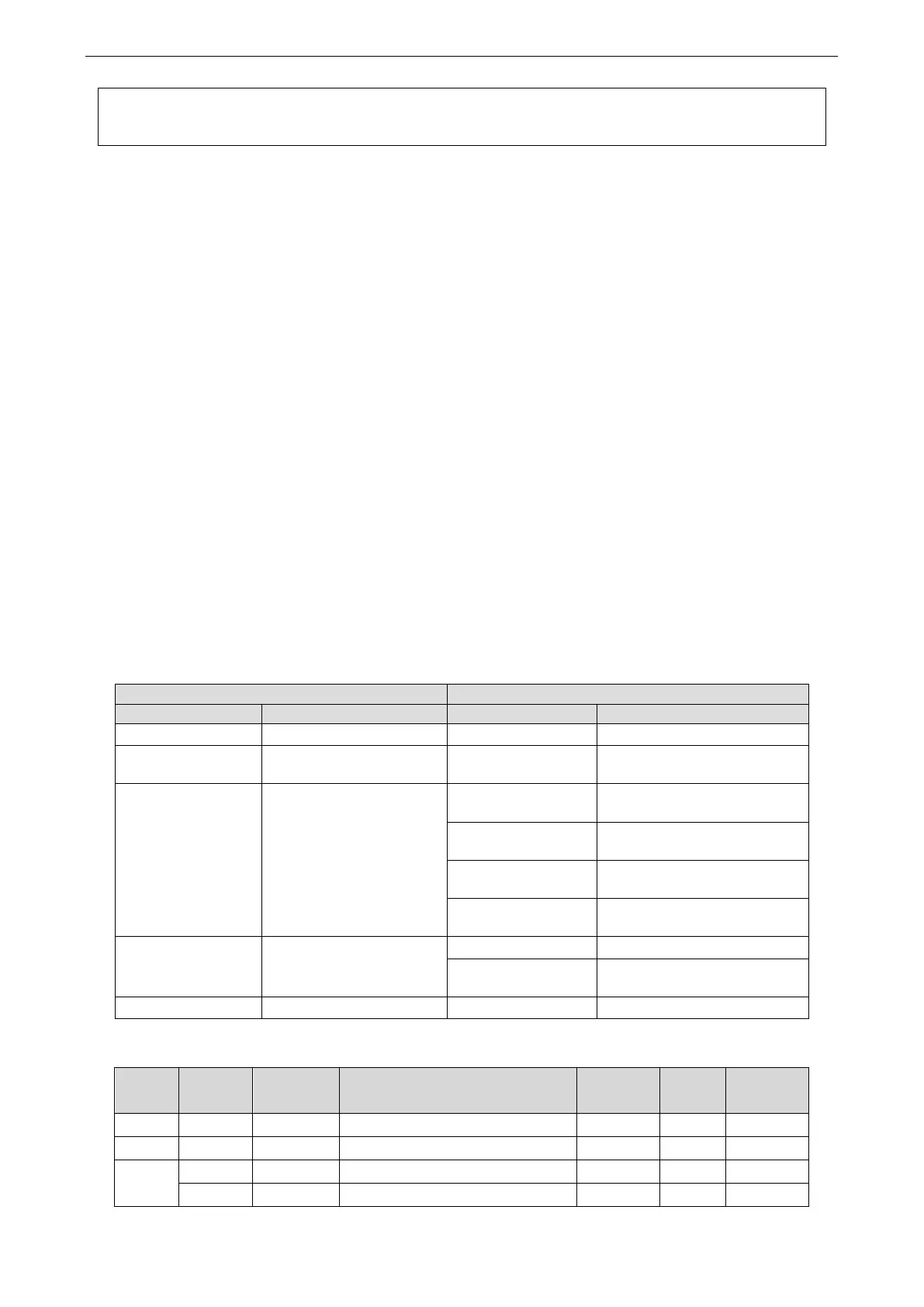
All objects of CANopen are configured in the object dictionary of each group through the 16bit Index address
represented by 4-bit hexadecimal.
The object dictionary of CoE (CANopen over EtherCAT) specified in CiA402 and the object dictionary of DF3E
series servo are as follows:
 Loading...
Loading...

