Actual signals and parameters
Parameters in the Long parameter mode
Sets the maximum display value for the signal selected by parameter 3415
SIGNAL3 PARAM. See parameter 3402 SIGNAL1 MIN.
Setting range depends on parameter 3415 SIGNAL3 PARAM setting.
Process PID (PID1) control parameter set 1.
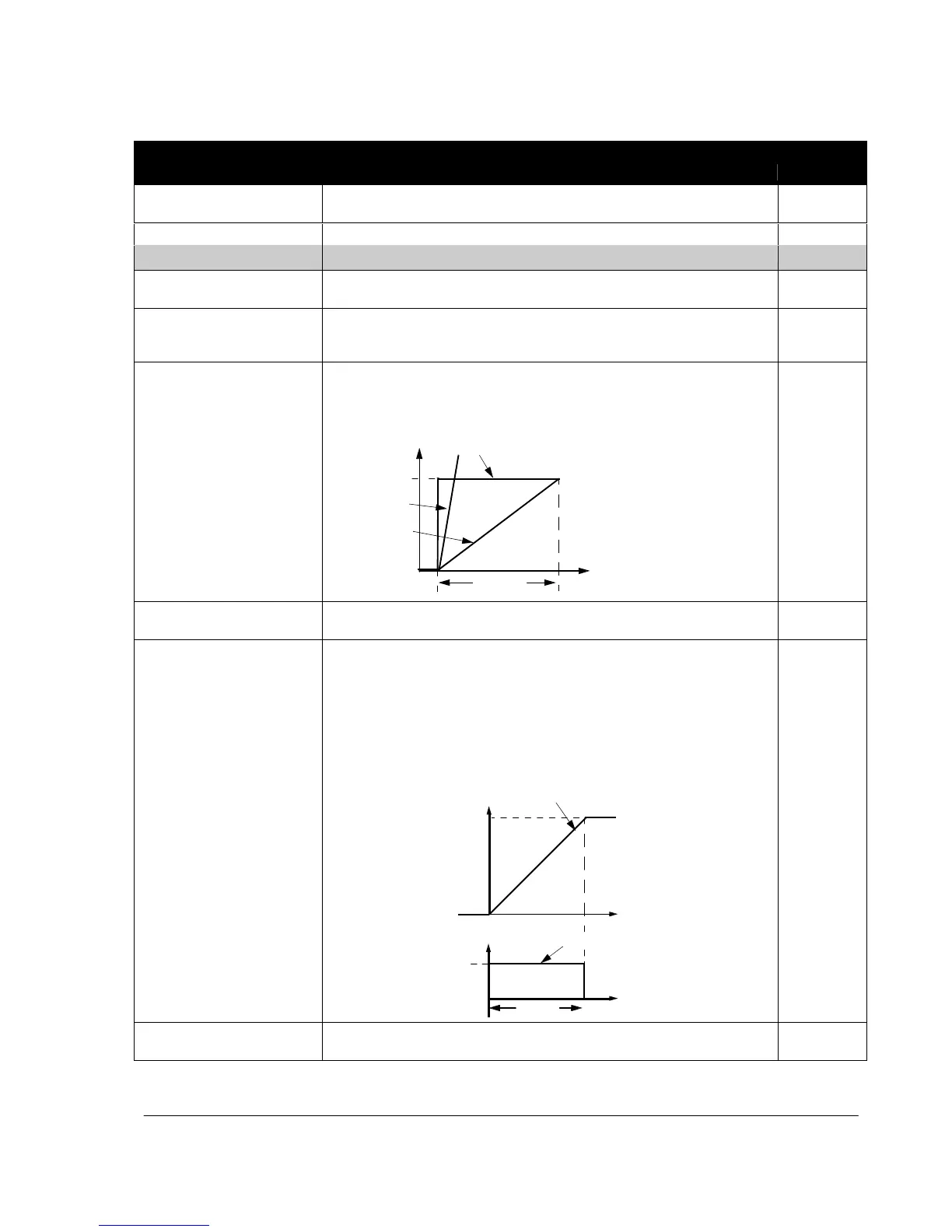
Defines the gain for the process PID controller. High gain may cause speed
oscillation.
Gain. When value is set to 0.1, the PID controller output changes one-tenth
as much as the error value. When value is set to 100, the PID controller
output changes one hundred times as much as the error value.
Defines the integration time for the process PID1 controller. The integration
time defines the rate at which the controller output changes when the error
value is constant. The shorter the integration time, the faster the continuous
error value is corrected. Too short an integration time makes the control
unstable.
A
A = Error
B
B = Error value step
C = Controller output with gain = 1
D (4001 = 10)
D = Controller output with gain = 10
C (4001 = 1)
t
4002
Integration time. If parameter value is set to zero, integration (I-part of the
PID controller) is disabled.
Defines the derivation time for the process PID controller. Derivative action
boosts the controller output if the error value changes. The longer the
derivation time, the more the speed controller output is boosted during the
change. If the derivation time is set to zero, the controller works as a PI
controller, otherwise as a PID controller.
The derivation makes the control more responsive for disturbances.
The derivative is filtered with a 1-pole filter. Filter time constant is defined by
parameter 4004 PID DERIV FILTER.
Error
Process error value
100%
0%
t
PID output
D-part of controller ou
tput
Gain
4001
4003
Derivation time. If parameter value is set to zero, the derivative part of the
PID controller is disabled.
 Loading...
Loading...









