DESIGNER’S HANDBOOK 4189350049C EN Page 50 of 206
5.2 Overall CAN bus parameter settings
Editing the CAN bus parameters list below requires a very good knowledge of CANopen and the special
manufacture specific CANopen functions built on top to obtain the XDi-net functions. It is therefore highly
recommended to consult the “XDi-net/CANopen reference manual” before making any changes in the CAN setup
parameters.
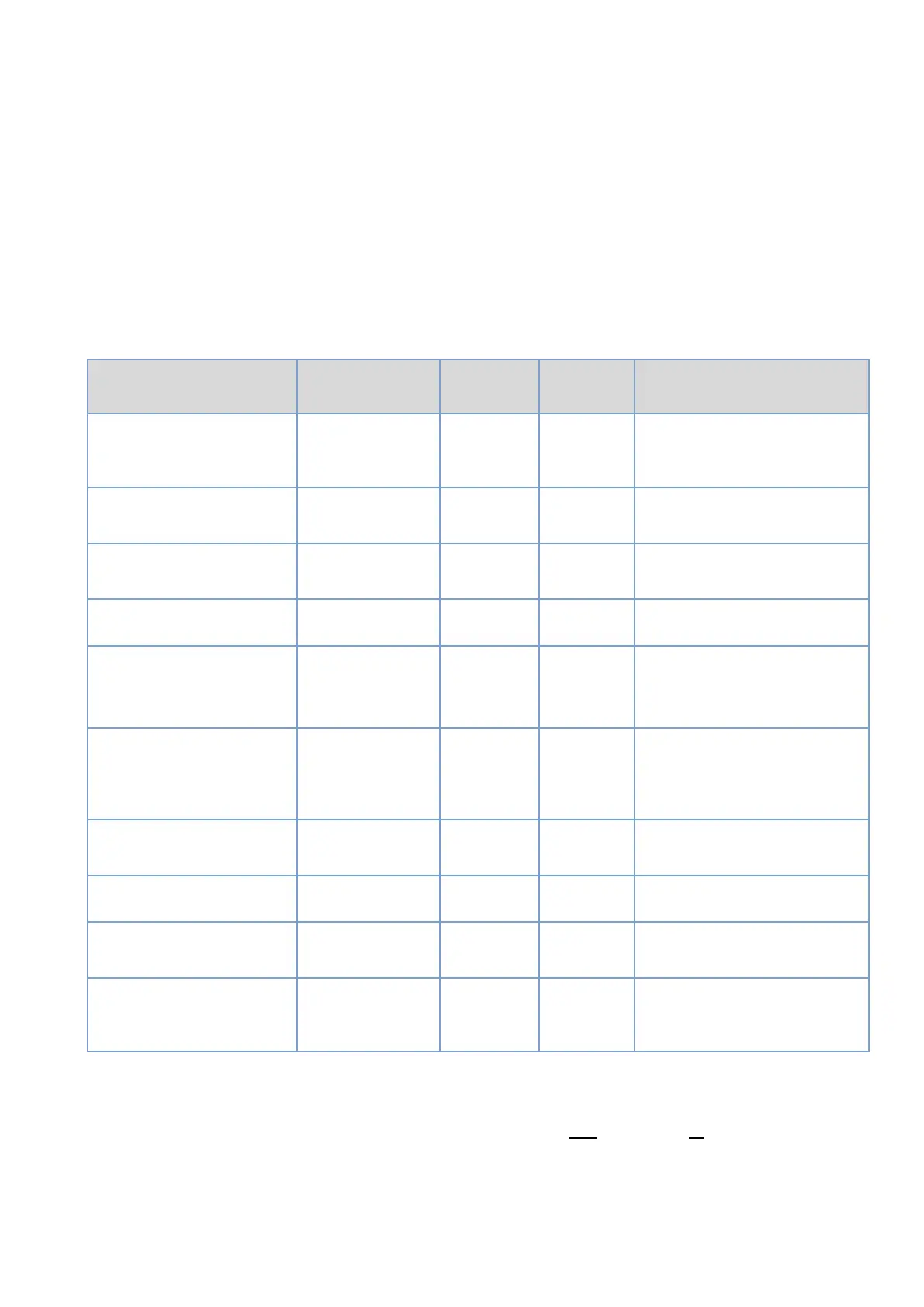
The parameters in the table below are the overall CAN controls, and they will in some cases overrule or limit local
CAN setting predefined in a product profile (PP) or a VI-setup profile (VS).
Example: an analogue input is set up to share data on CAN1 and CAN2, and the overall CAN bus mode in the
table below is set up to be “Single CAN” (CAN1). Then data is only shared on CAN1.
The default CAN bus parameters are defined in the selected product profile.
Single CAN,
2 x single CAN,
Redundant CAN
Selecting Single CAN will keep
CAN 1 active and close all
activities on CAN2.
20, 50, 125, 250
(500, 800, 1000)
500, 800, 1000 kbps is only for
short distances.
20, 50, 125, 250
(500, 800, 1000)
125 kbps is normally used for
marine CANopen application.
All XDi-net functions are
disabled.
XDi-net variable data on:
(See “Important XDi-net
restrictions”)
Allows for transmission and
reception of XDi variable data
between XDi units on the CAN
bus.
Send XDi-net setup synch
data on:
(See “Important XDi-net
restrictions”)
XDi will be able to synchronise
parameter changes if this
function is ON.
Must be ON when XDi-net
and/or redundant CAN is used.
Auto start XDi on the CAN
bus:
Must be ON when XDi-net is
active.
Send CAN start command
on CAN bus:
Used to activate a CAN sensor
without built-in auto-start.
DAM-MPDO to be used:
(See “Important XDi-net
restrictions”)
Only used if DAM-MPDO data
transfer is used.
Bold is the preferred selection.
5.2.1 Important XDi-net restrictions:
When ”XDi-net variable data on” is set to one or both CAN ports, then ALL RPDO1s for all CAN NodeIDs on that
CAN bus are reserved for XDi-net functions, and RPDO1 must not be used for other purposes!
When function “Send XDi-net setup synch data on” is set to a CAN port, then TPDO1-4 and RPDO1-4 are reserved
for node 127. Node 127 is also used as a “parking” node for the XDi’s service units.

 Loading...
Loading...