6-7-10
Position Preset
The current position can be overwritten by the setting of Preset Position (MSB) (d240) and Preset Po-
sition (LSB) (d241) at the ON edge of digital input “PSET
.” The current position can be preset in either
position control and speed control.
When “PSET” is turned ON during position control operation, the current position is overwritten by the
preset position and movement to the target position is performed. When “PSET” is turned ON after po-
sition control stop, the current position is overwritten, however, movement to the target position is not
started. To perform movement, either turn the RUN command OFF then back ON again, or turn “POS-
SET” ON.
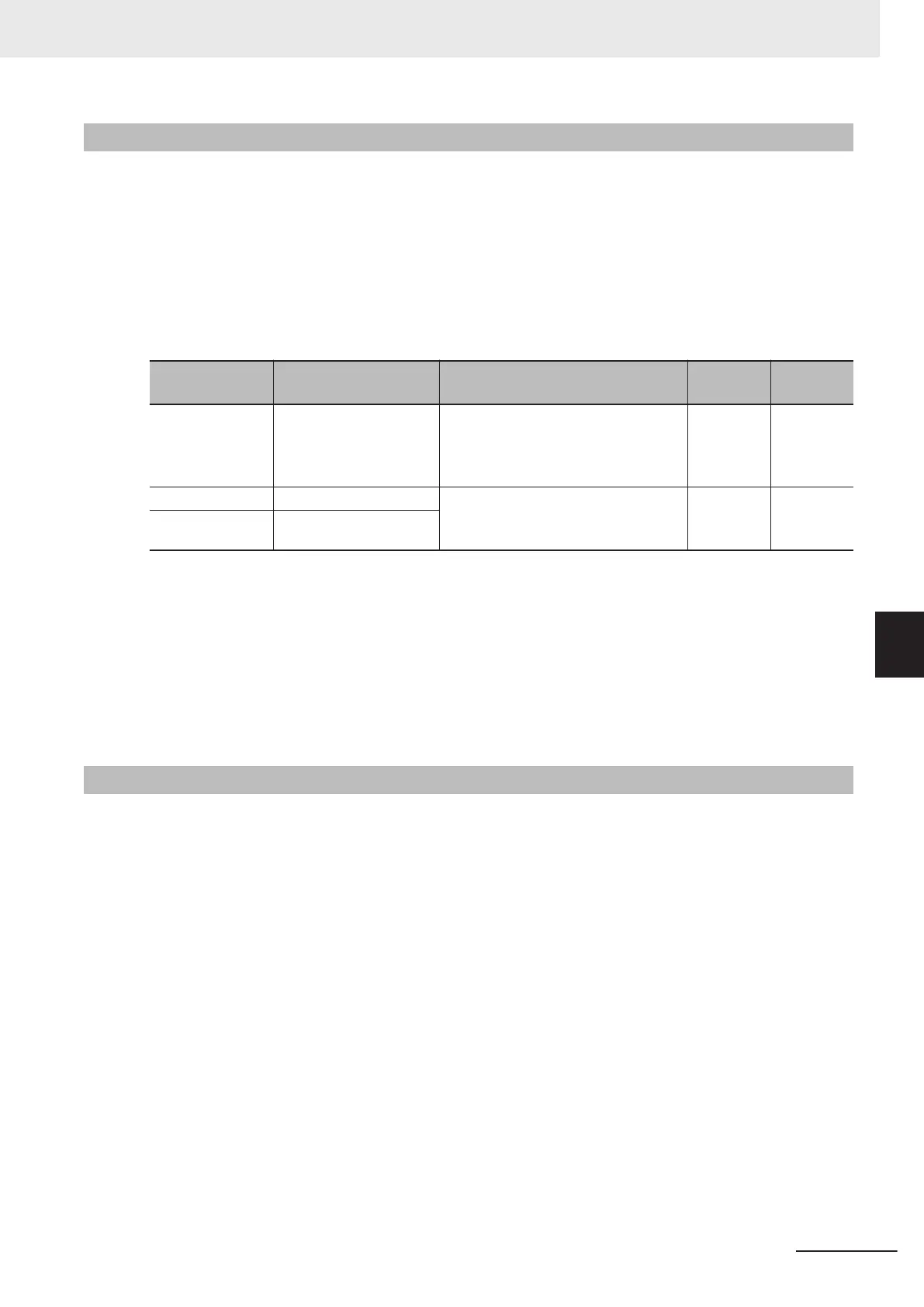
Parameter No. Function name Data
Default
data
Unit
E01 to E05
E98
E99
Input Terminal [DI1]
Function Selection to In-
put Terminal [DI7] Func-
tion Selection
142 (1142): Current position preset
“PSET”
- -
d240
Preset Position (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d241 Preset Position (LSB)
Position control by pulse train input
Position control can be performed with pulse train input used as the pulse position command.
When digital input “SPD” is turned OFF with “12: Pulse train input” set to 1st Frequency Reference
Selection (F01)/2nd Frequency Reference Selection (C30), position control is made to operate by
taking the pulses according to the pulse train input as the position command pulse.
For details on the pulse train input method, refer to 7-9-17 Pulse Train Frequency Input
on page
7-145.
6-7-11
Orientation
The orientation function can be used as an applied function for position control. In speed control, ori-
entation can be performed during operation or while operation is stopped.
Orientation during speed control
With speed control, a motor in rotation can be stopped at a desired mechanical position. When digi-
tal input “ORT” is turned ON (②
) during operation in speed control, deceleration is performed up to
the frequency set in Homing Frequency/Orientation Frequency (d213) for the currently selected de-
celeration time, control transitions to the position control mode (③), the rotation amount that allows
a deceleration stop at the setting in Deceleration Time for Homing/Orientation (d215) up to the po-
sition of the currently selected positioning data is calculated from the current position, and the mo-
tor rotates for that calculated rotation amount and stops.
The positioning data can be selected from Positioning Data 1 to 8 (d244 to d259) by digital input
position command selection signals “CP1,” “CP2” and “CP3”. When assigning positioning data as
factory default absolute positions (ABS), the absolute positions are referenced to the Z phase of
the encoder. To assign positioning data as absolute positions referenced not to the Z phase of the
encoder but to the machine origin position, Positioning Data 1 to 8 (d244 to d259) can be handled
as it is as the positioning data of the machine origin reference by setting the position offset of the
6 Vector Control and Applied Functions
6-49
M1 Series Standard Type User's Manual (I669)
6-7 Position Control
6
6-7-10 Position Preset
 Loading...
Loading...









