3-3-7
Teaching Positions
This section describes the procedure to use the simulation function of the Sysmac Studio for teaching
the positions.
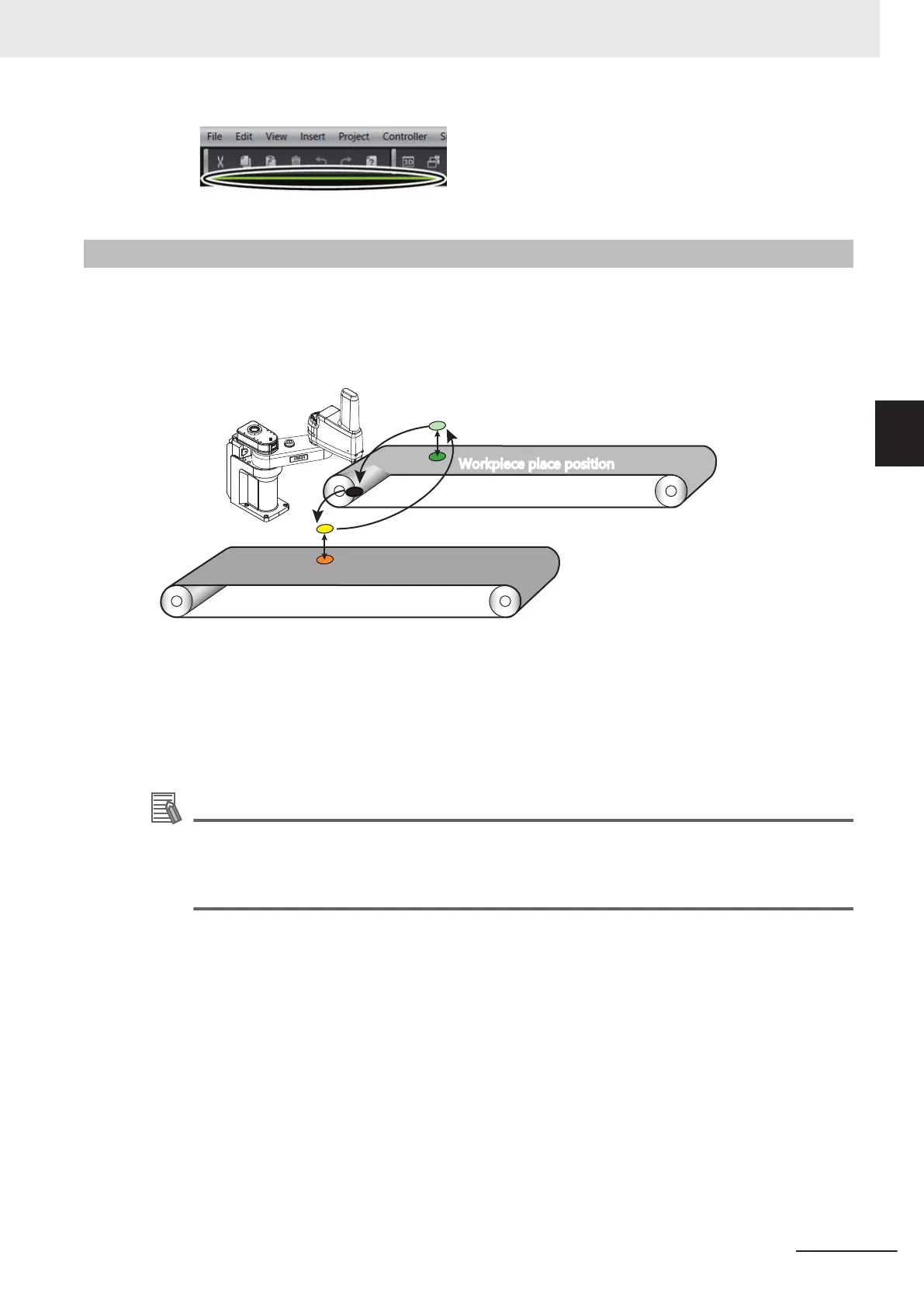
The target of teaching in this equipment model is the wait position of the robot and the pick-up and
place positions of the workpiece.
Robot wait positionRobot wait position
Conveyor A: static state
Con
veyor B: static state
Robot wait position
Workpiece pick-up positionWorkpiece pick-up positionWorkpiece pick-up position
Wo
rkpiece place position
Workpiece place positionWorkpiece place position
You can operate the robot during the simulation in either of the following two ways. Select one of the
following depending on the positioning accuracy required for operation and movement.
• Manipulate the tool center point of the robot with the mouse in the 3D Visualizer
•
Manipulate each axis of the robot in V+ Jog Control pane
Additional Information
• To move the robot to its approximate position, it is convenient to use the mouse and move the
tool center point of the robot on the 3D Visualizer
.
• To move the robot precisely to its correct position, manipulate each axis of the robot in the V+
Jog Control pane
3 Implementation Example of Static Pick-and-place Equipment
3-57
NJ-series Robot Integrated System Startup Guide (O049)
3-3 Programming and Simulation Procedures
3
3-3-7 Teaching Positions

 Loading...
Loading...












