Classification Item
Applicability ( if applicable, the specified method is
described.)
Sequence control program V+ program
Robot’s coordinate Flange surface
_RC_RBT[*].TCPActPos
*2
HERE
Coordinates of the tool center
point
_RC_RBT[*].TCPActPos
*2
(RC_SetToolT
ransform
*1
)
HERE
(T
OOL)
Joint coordinates for each axis
_RC_RBT[*].JointActPos
*2
#PHERE
Other functions
Robot built-in I/O
_RC_RBT_IO[*].XIO
*2
SIGNAL/SIG
Expanded robot I/O
_RC_RBT_IO[*].IOBlox1
*2
_RC_RBT_IO[*].IOBlox2
*2
SIGNAL/SIG
Teaching Not possible. Position variables
End effector operation
_RC_RBT_IO[*].RO
*2
SIGNAL/SIG
Robot position latching Not possible. LATCH
Robot built-in encoder latching Not possible. DEVICE
Cooperation with Application
Manager
Not possible. ACE Sight V+ key-
word
V+ Module API
*1. This is a robot control instruction.
*2. This is a system-defined variable for robot control.
Refer to the NJ-series Robot Integrated CPU Unit User
’
s Manual (Cat. No. O037) for detailed informa-
tion when a robot is controlled with a sequence control program.
Refer to the eV+3 User's Manual (Cat. No. I651) and eV+3 Keyword Reference Manual (Cat. No.
I652) for detailed information when a robot is controlled with a V+ program.
1-6-3
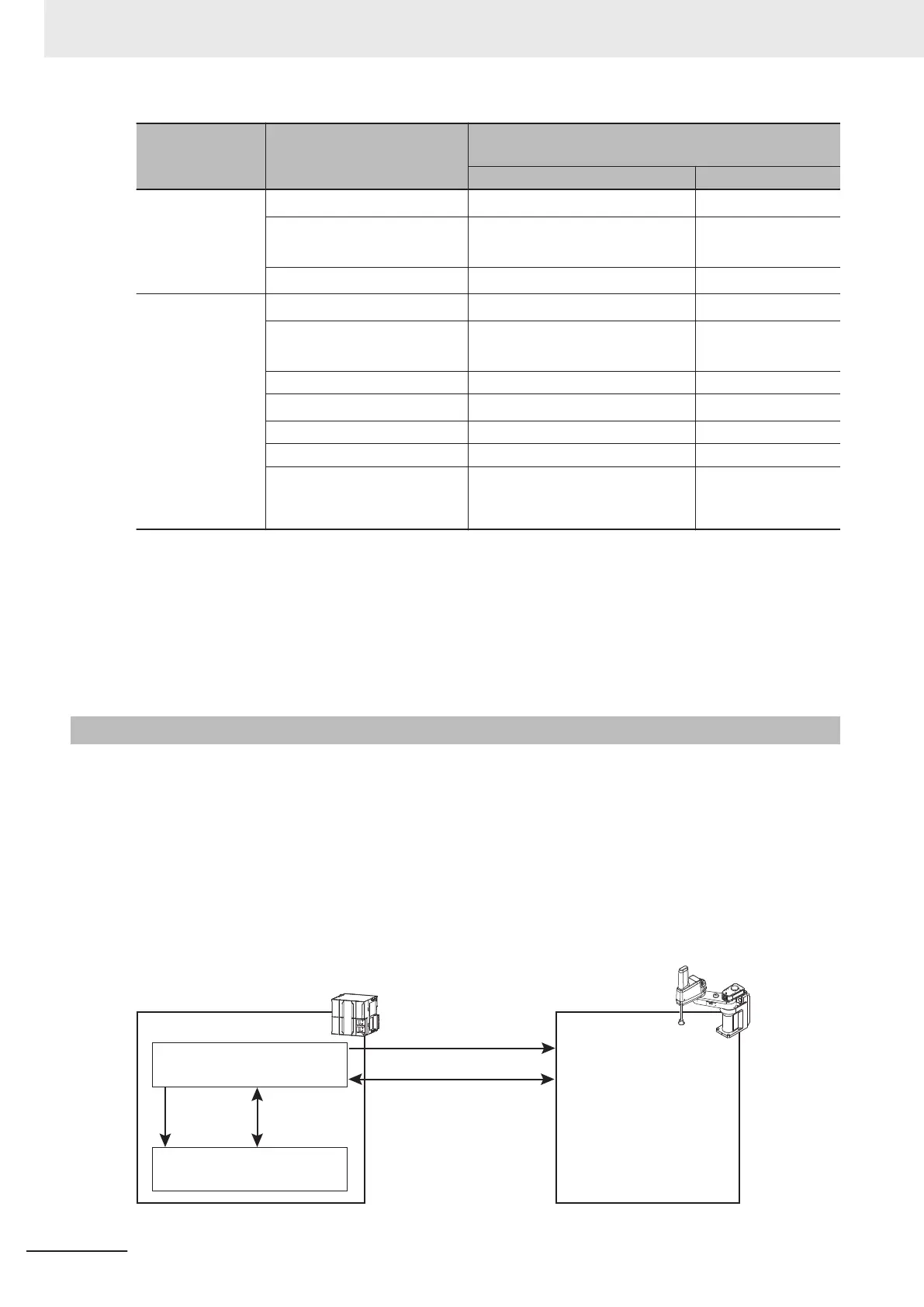
Command and Data Flow
This section describes the flow of commands and data for the the sequence control program, V+ pro-
gram, Application Manager
, and robot.
The sequence control program can control robots with robot control instructions, robot variables, and
robot I/O variables.
The program must call a V+ program with RC_ExecVpPrgT
ask and copy the location information to
the shared variables because the teaching location information is a position variable in the V+ pro-
gram.
Robot Integrated CPU Unit
Sequence control program
V+ program
Shared variables
(Teaching
position variable,
etc.)
OMRON robot
Robot control instructions
Robot variables,
robot I/O variables
Start, stop, or
monitor
V+tasks
1 Overview
1-10
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












