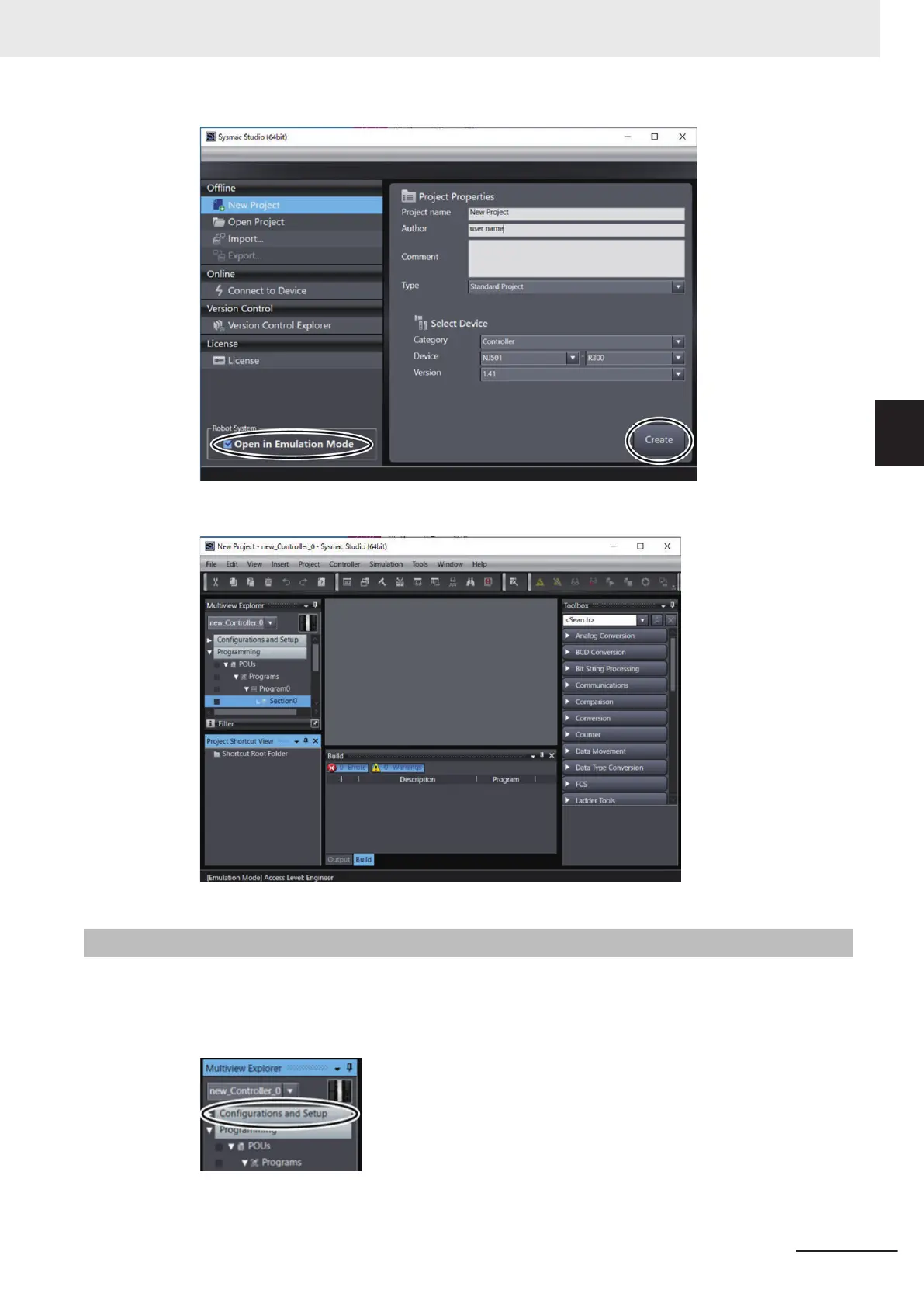
A project file is created and the following window is displayed.
3-3-2
Creating the EtherCAT Network Configuration
Create the EtherCAT network configuration and add a robot on the network.
1 Click Configurations and Setup in the Multiview Explorer
.
Setting items are displayed under Configurations and Setup in the tree.
3 Implementation Example of Static Pick-and-place Equipment
3-19
NJ-series Robot Integrated System Startup Guide (O049)
3-3 Programming and Simulation Procedures
3
3-3-2 Creating the EtherCAT Network Configuration

 Loading...
Loading...












