1-2
System Configuration for Static Pick-
and-place Equipment
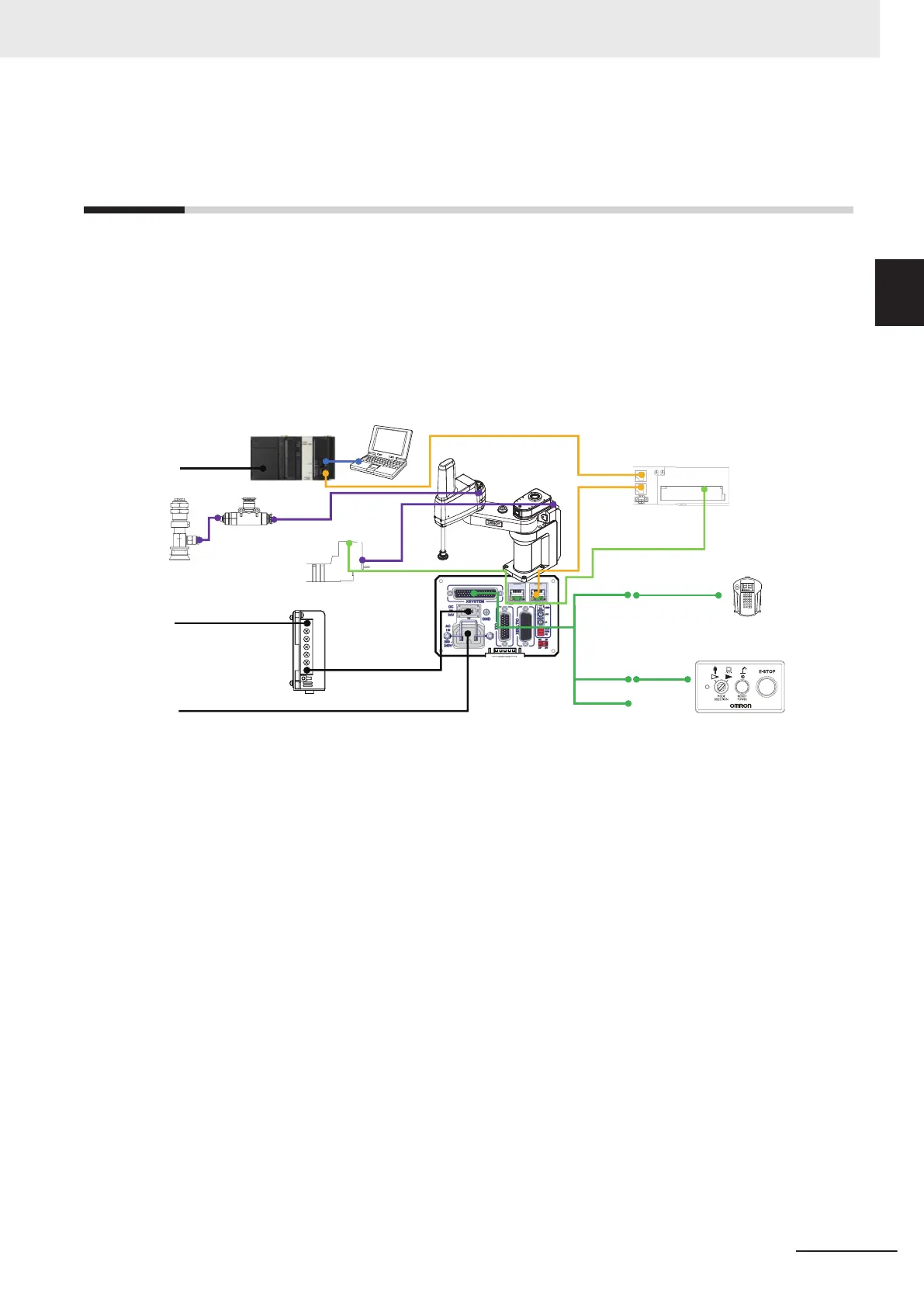
This section describes the system configuration for the static pick-and-place equipment that is ex-
plained in this guide.
An equipment to move a workpiece that is not moved at the specified position to the target position is
called a static pick-and-place equipment in this guide.
"XUSR" in the following figure is a wiring to the safety circuits. Refer to A-1 Designing Example of the
Safety Functions for the Pick-and-place Equipment on page A-2, and design the safety circuits re-
quired for the actual equipments.
(P)
(G)
(C)
(B)
(A)
(S)
(E)
(D)
(R)
(O)
(N)
(M)
(Q)
(F)
(H)
(J)
(I)
(L)
(K)
100 to 240 VAC
85 to 264VAC, 6.5A
Single phase, AC200 to 240VAC, 10A
XMCP
XFP
XUSR
*1
The parts that are used in the system configuration are given below.
1 Overview
1-3
NJ-series Robot Integrated System Startup Guide (O049)
1-2 System Configuration for
Static Pick-and-place Equipment
1

 Loading...
Loading...












