1-3
Operations of Static Pick-and-place
Equipment
This section describes the operating specifications and procedures for the static pick-and-place equip-
ment.
1-3-1
Operating Specifications
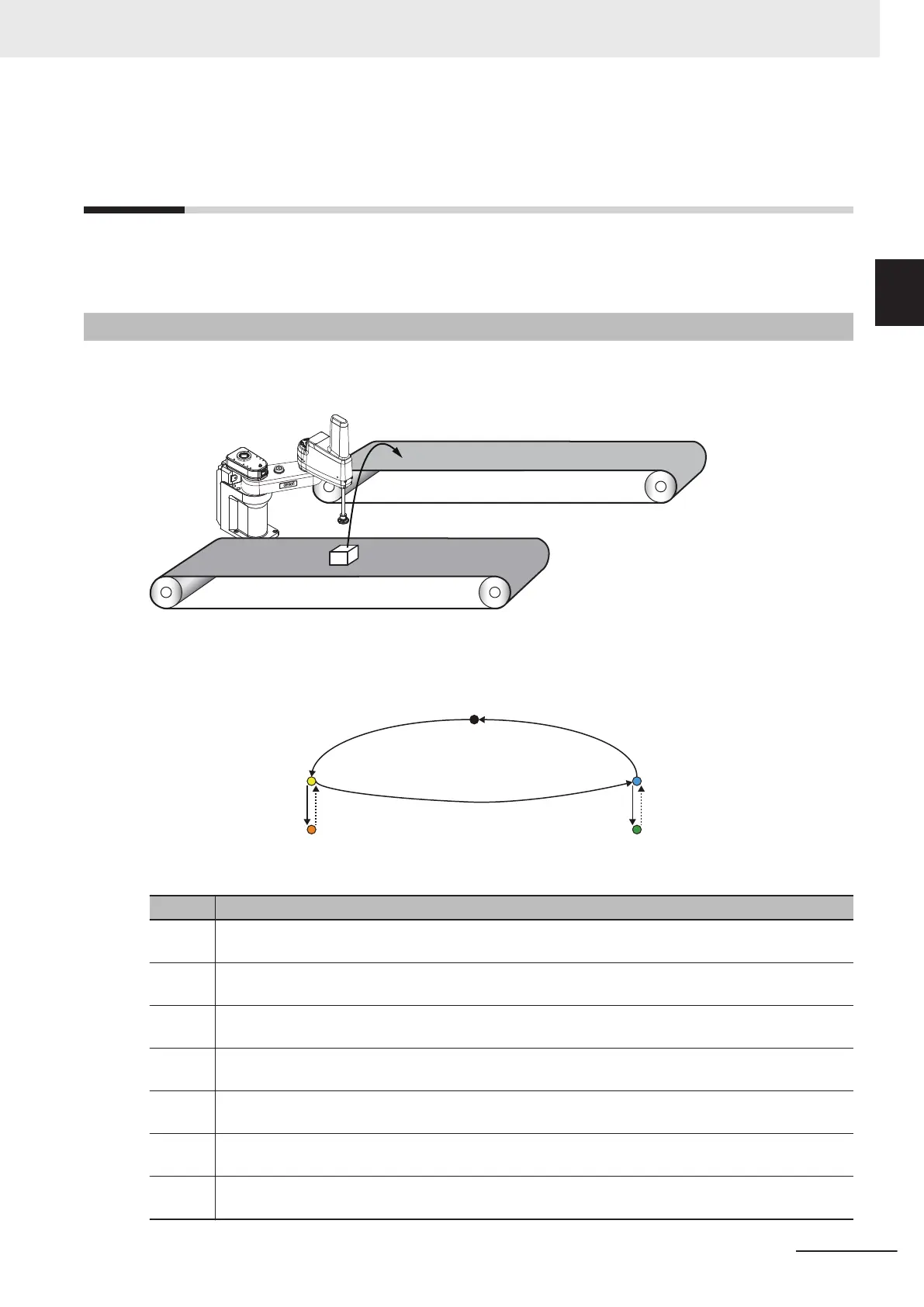
This equipment picks up a workpiece that is not moving on the conveyor A and transfers it to the
specified position on the conveyor B.
Workpiece
Conveyor A: static state
Con
veyor B: static state
The following figure shows a specific operation for a robot.
Robot wait position (P1)
(1) (7)
(2) (3) (5) (6)
(4)
Workpiece pick-up
approach point (P2)
Workpiece pick-up
position (P3)
Workpiece place
position (P5)
Workpiece place
approach point (P4)
Number Description of operation
(1) Move from the robot wait position (P1) to the workpiece pick-up approach point (P2) in joint interpola-
tion operation.
(2) Move from the workpiece pick-up approach point (P2) to the workpiece pick-up position (P3) in linear
interpolation operation.
(3) Move from the workpiece pick-up position (P3) to workpiece pick-up approach point (P2) in linear in-
terpolation operation.
(4) Move from the workpiece pick-up approach point (P2) to the workpiece place approach point (P4) in
joint interpolation operation.
(5) Move from the workpiece place approach point (P4) to the workpiece place position (P5) in linear in-
terpolation operation.
(6) Move from the workpiece place position (P5) to the workpiece place approach point (P4) in linear in-
terpolation operation.
(7) Move from the workpiece place approach point (P4) to the robot wait position (P1) in joint interpola-
tion operation.
1 Overview
1-5
NJ-series Robot Integrated System Startup Guide (O049)
1-3 Operations of Static Pick-
and-place Equipment
1
1-3-1 Operating Specifications

 Loading...
Loading...












