3-4-3
Teaching
A robot is operated actually to check and correct teaching data.
Move the robot to the teaching position set in the simulation operation actually, and adjust the position
if necessary
. The teaching position data is saved in the SD Memory Card so that the data is retained
after the power supply to the Robot Integrated CPU Unit is turned OFF.
The T20 pendant is used for teaching. Refer to the T20 Pendant User’s Guide (Cat. No. I601) for infor-
mation on the specifications of the T20 pendant.
Place a workpiece where you plan to pick it up before performing the teaching operation.
Precautions for Correct Use
When you operate the robot in MANUAL mode with the T20 pendant, you must plug the iCS
Commissioning Jumper into the XBELTIO connector and change the setting for the T
each Re-
strict. Refer to the eCobra 600 and 800 Robot with EtherCAT User’s Guide (Cat. No. I653) for
details.
Turning Robot High Power ON
The robot high power is turned ON.
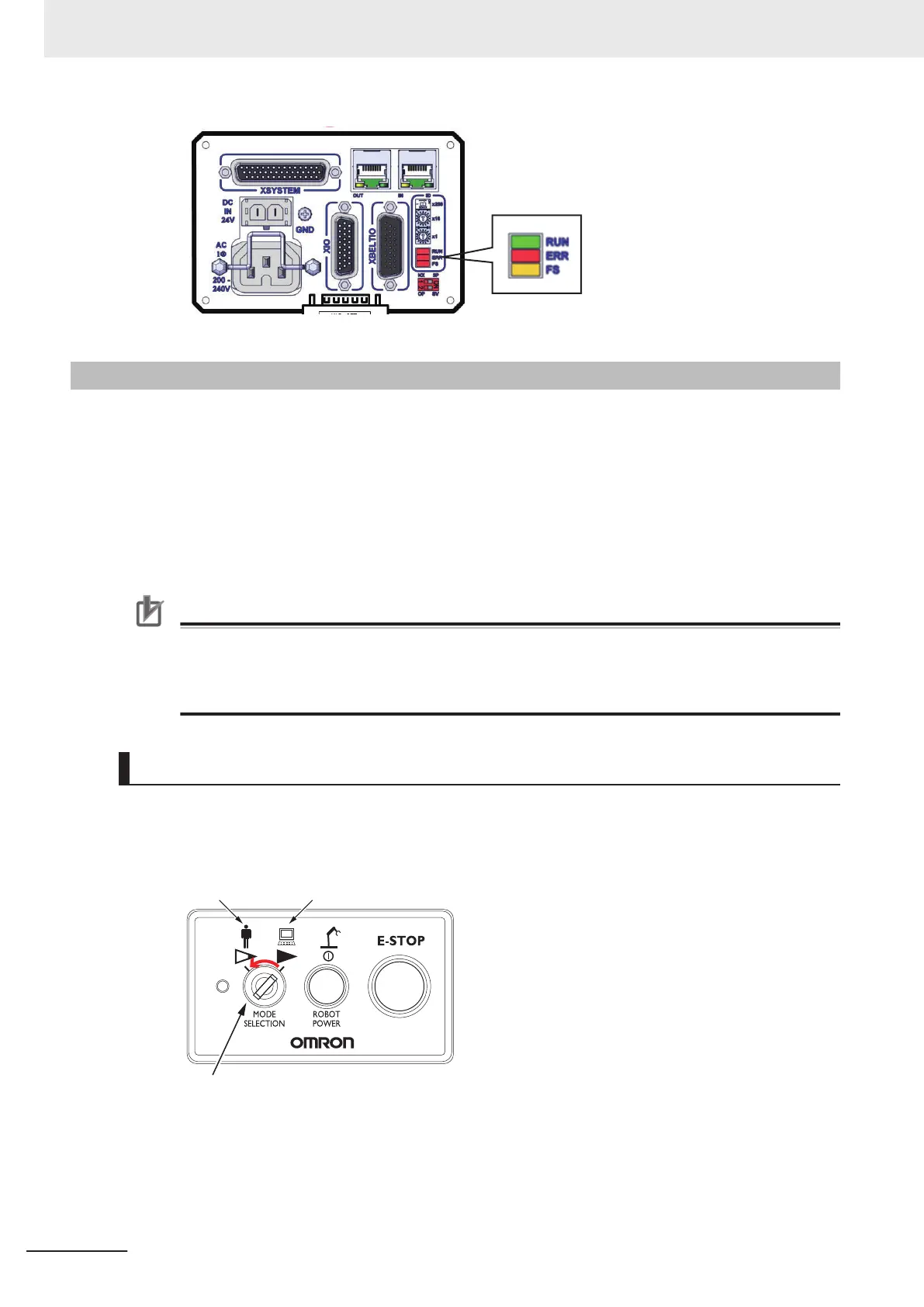
1 Change the operating mode switch on the front panel to Manual Mode.
Manual Mode
Operating mode switch
Auto Mode
2 Press the enable switch on the T20 pendant to Position 2 (half-way).
3 Implementation Example of Static Pick-and-place Equipment
3-80
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












