3-1-1
When Operations are Controlled with Sequence Control Pro-
gram
The program specifications when operations of static pick-and-place equipment are controlled with the
sequence control program are described below
.
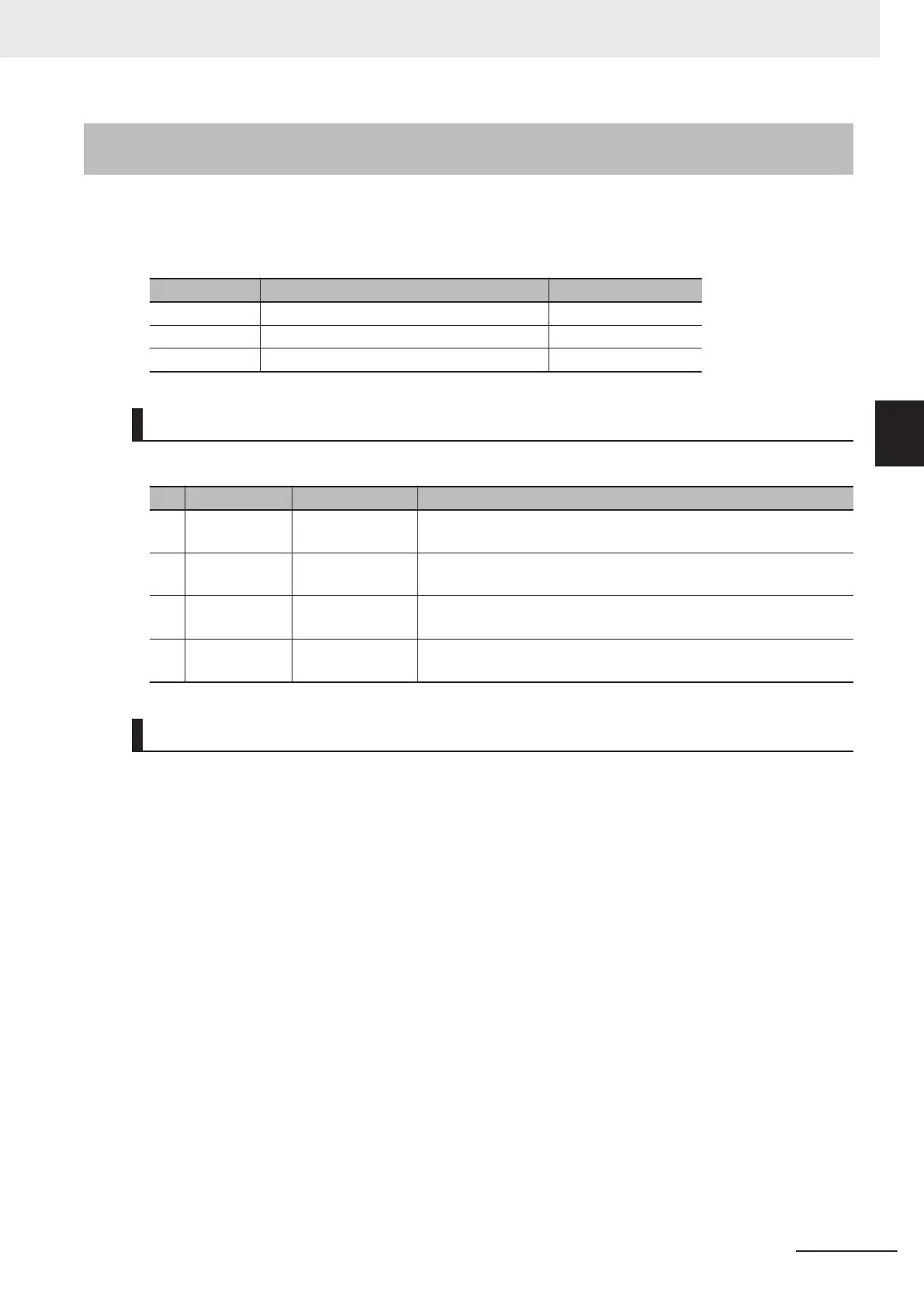
The program consists of the following programs.
Program name Language Description
Main Sequence control program (Ladder diagram) Main program
Run Sequence control program (Ladder diagram) Operating program
loccopy V+ program Variable copy program
Shared Variables
The following table shows a list of shared variables that are used in this program.
No. Variable name Data type Description
1 eLoc_Wait ARRAY[0..5] OF
LREAL
Use the variable to send the robot wait position from the V+ pro-
gram to the sequence control program.
2 eLoc_Place ARRAY[0..5] OF
LREAL
Use the variable to send the robot place position from the V+ pro-
gram to the sequence control program.
3 eLoc_Pick ARRAY[0..5] OF
LREAL
Use the variable to send the robot pick-up position from the V+ pro-
gram to the sequence control program.
4 eBool_Exe BOOL Use the variable to check that the execution of a V+ task is started
in the sequence control program.
Sequence Control Program
This section describes the sequence control program to control the static pick-and-place equipment.
The sequence control program is used to register global variables and create two programs,
"Main
"
(main program) and "Run" (operating program).
Global Variables
Register the global variables that are used in the sequence control program.
3 Implementation Example of Static Pick-and-place Equipment
3-3
NJ-series Robot Integrated System Startup Guide (O049)
3-1 Program Specifications for Static Pick-and-place
Equipment
3
3-1-1 When Operations are Controlled with Sequence Control Program

 Loading...
Loading...












