1-6
User Program
The user program for robot control is created in the Sysmac Studio.
There is more than one method to create a user program. Realize applications to use with programs
created by multiple methods.
1-6-1
Types of Method to Create User Program
The following table shows the types of method to create a user program.
Method Description
Sequence
control pro-
gram
The user program that is operated in the Robot Integrated CPU Unit can be programmed with the
language that is defined in IEC61
131-3. The robots are controlled with robot control instructions
and system-defined variables for robot control.
This program is suitable for operating simple robot motions or controlling with robots and periph-
eral devices.
Ladder diagram is used in this guide.
V+ program
The user program that is operated in the Robot Integrated CPU Unit can be programmed with V+
language. The language is a programming language for robot control for the OMRON robots. The
robots can be controlled using V+ keywords.
In addition, you can use ACE Sight V+ keywords and V+ module API to call and use the functions
of the Application Manager.
This program is suitable for using various robot control.
1-6-2
Proper Use of Sequence Control Program and V+ Program
The following shows proper use of the sequence control program and V+ program.
•
The sequence control program manages the status, errors, and interlocks of the entire system in-
cluding sequence control and robot control.
•
The robot control is performed with a combination of the sequence control program and the V+ pro-
gram.
• The sequence control program performs the control other than robot control.
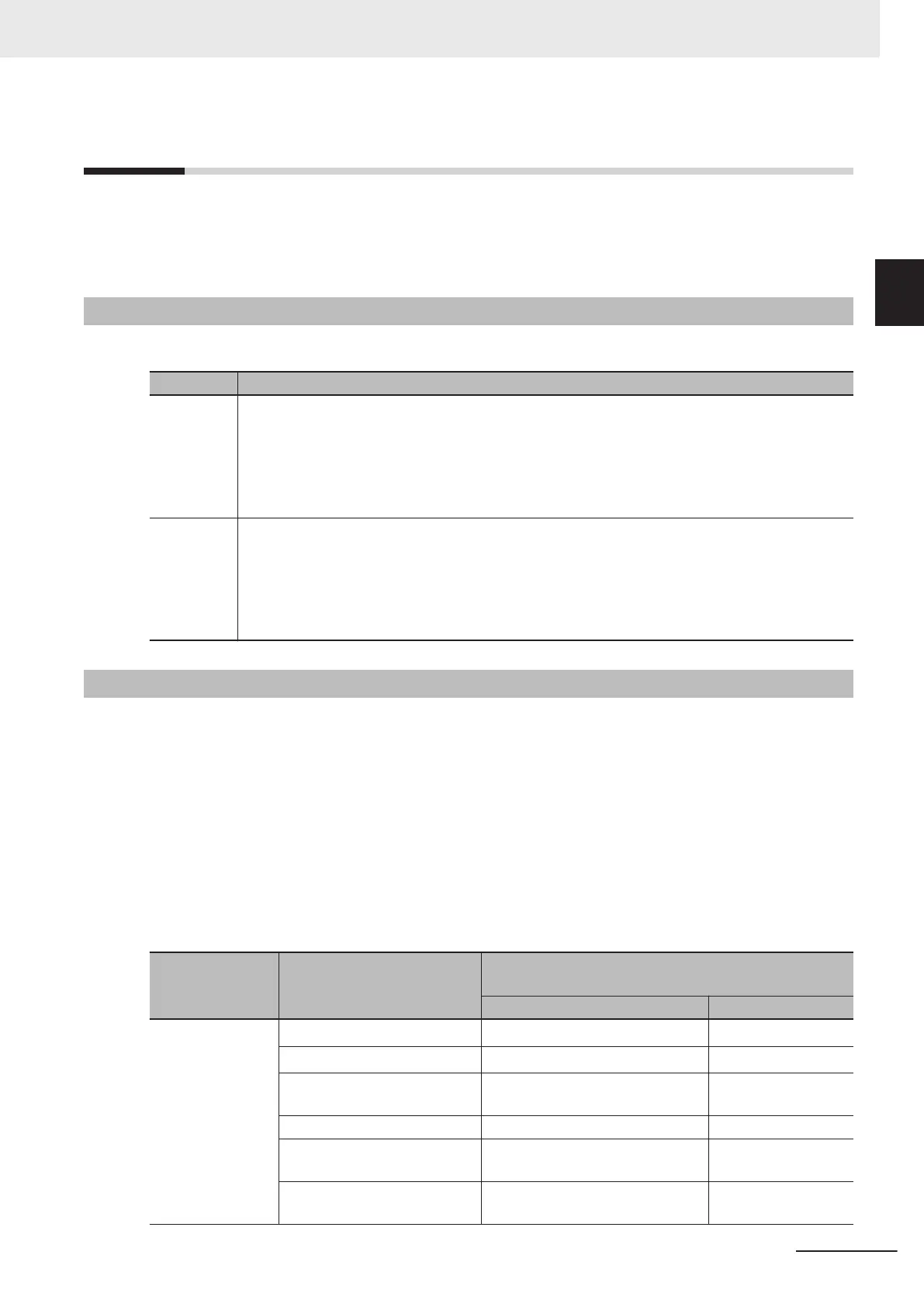
A typical example of differences for robot control that can be used in the sequence control program
and the V+ program is given below.
The sequence control program can use a part of the control that is available in the V+ program.
Classification Item
Applicability ( if applicable, the specified method is
described.)
Sequence control program V+ program
Robot operations Joint interpolation operation
RC_MoveDirect
*1
MOVE
Linear interpolation operation
RC_MoveLinear
*1
MOVES
Circular interpolation opera-
tion
Not possible. MOVEC
Jog operation Not possible. JOG
Joint coordinate system oper-
ation
Not possible. JMOVE
Tool coordinate system opera-
tion
Not possible. APPRO/DEPART/
ALIGN
1 Overview
1-9
NJ-series Robot Integrated System Startup Guide (O049)
1-6 User Program
1
1-6-1 Types of Method to Create User Program

 Loading...
Loading...












