Variable Copy Program
"loccopy" (variable copy program) is used to copy the global variables in the V+ program to the
shared variables with the sequence control program.
A program is described below.
.PROGRAM loccopy()
; ABSTRACT: Copy location data to IEC 61131-3 global variables.
; MISC: Program created in ACE version 1.0.1.0
;* Copyright (c) 2020 by {OMRON}
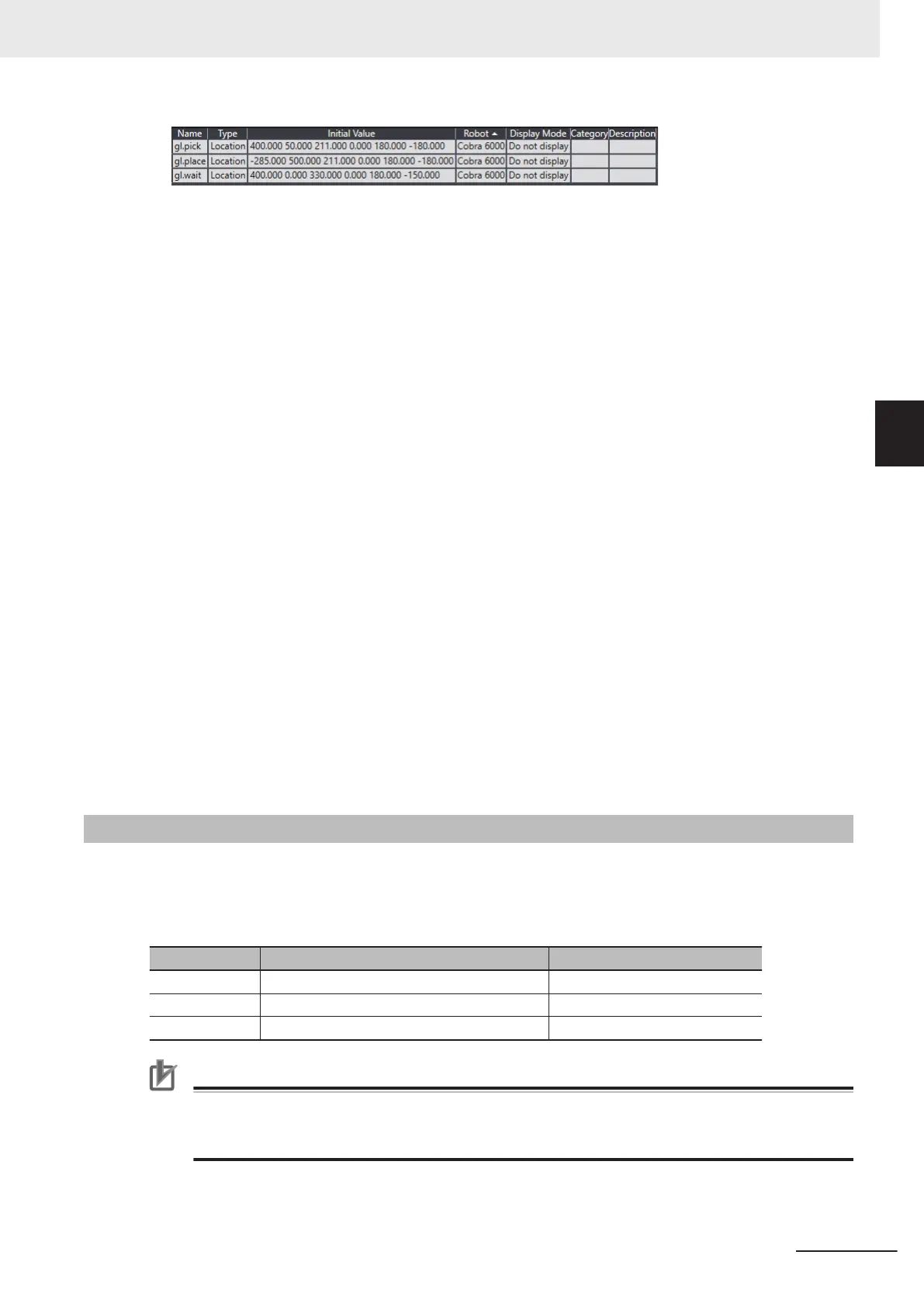
GLOBAL gl.pick, gl.place, gl.wait
EXTERNAL eloc_pick[], eloc_place[], eloc_wait[]
EXTERNAL ebool_exe
ebool_exe = TRUE
; Copy location data to external variables
DECOMPOSE eloc_pick[] = gl.pick
DECOMPOSE eloc_place[] = gl.place
DECOMPOSE eloc_wait[] = gl.wait
.END
Read Program
"auto" (read program) is used to read the V+ program and global variables from the SD Memory
Card to main memory.
Refer to
3-3-8 Setting up Automatic Loading of V+ Programs and Variables at Power ON on page
3-67 for information on "auto" (read program).
3-1-2
When Operations are Controlled with V+ Program
The program specifications when operations of static pick-and-place equipment are controlled with the
V+ program are described below
.
The program consists of the following programs.
Program name Language Description
Main Sequence control program (Ladder diagram) Main program
run V+ program Robot commands send program
run.checkmode V+ program V+ program stop program
Precautions for Correct Use
The V+ programs continue even if the Robot Integrated CPU Unit changes to PROGRAM
mode. The run.checkmode is a program to detect PROGRAM mode and stop the robot motion
and V+ programs.
3 Implementation Example of Static Pick-and-place Equipment
3-11
NJ-series Robot Integrated System Startup Guide (O049)
3-1 Program Specifications for Static Pick-and-place
Equipment
3
3-1-2 When Operations are Controlled with V+ Program

 Loading...
Loading...












