4-84
Note 1. There is a maximum delay of 2 ms in reading the input signal.
Note 2. When switching from speed control to position control, input the pulse command after TVSEL
(control mode switching) has turned OFF, INP1 (positioning completed output 1) signal has
turned ON, and 2 ms has elapsed. The pulses will be ignored until the positioning completed
(INP1) signal has turned ON.
Note 3. The shaded areas in the time chart for the positioning completed 1 (INP1) signal indicate the
places where the signal is turned ON as the VCMP (speed compare) signal. (The meaning of
the signal differs according to the control mode.)
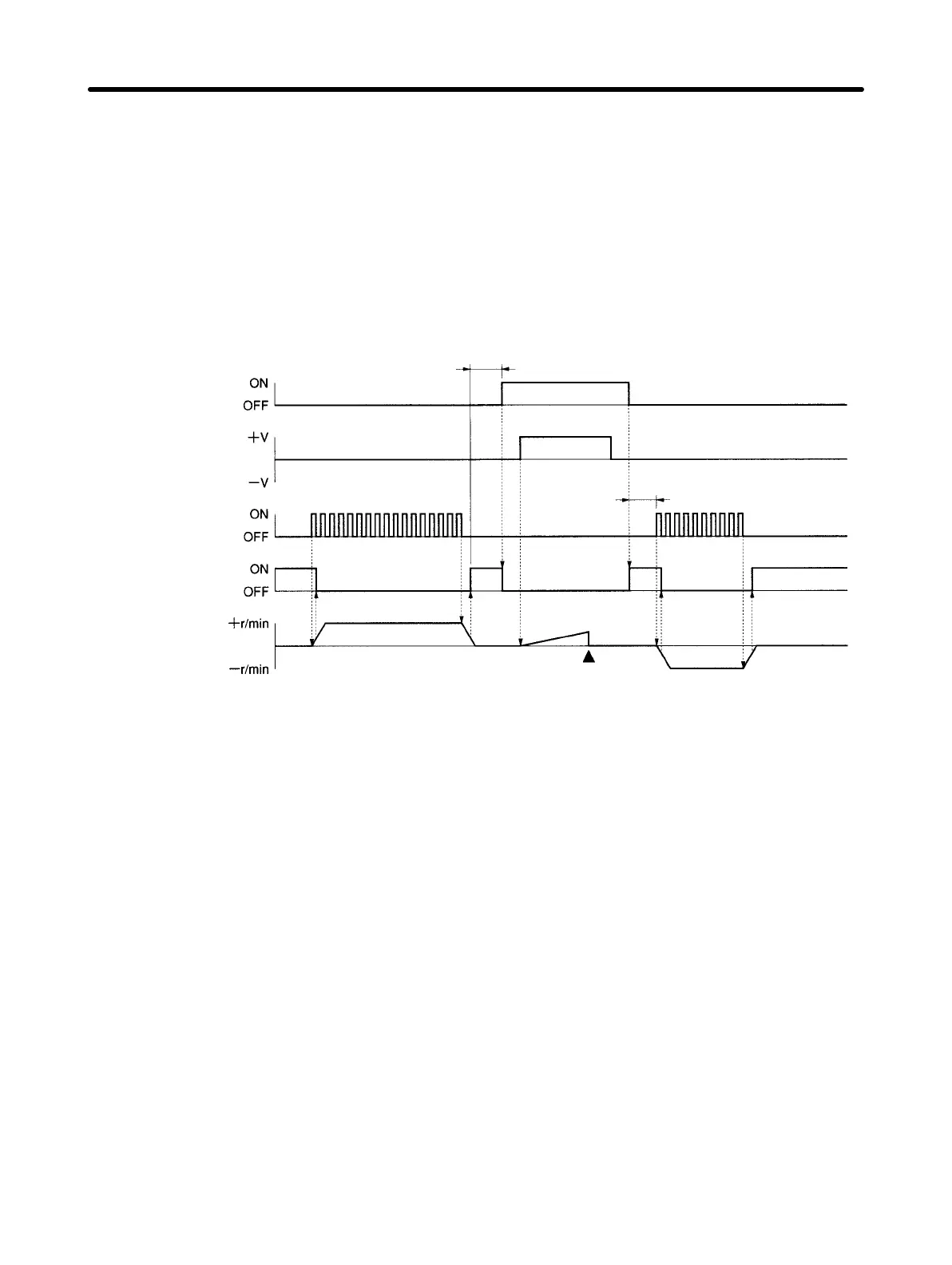
D Position and Torque Control Switching Example (Pn000.1 = 8)
Control mode
switching
TVSEL
Torque command
input
TREF
Pulse commands
Positioning com-
pleted signal
INP1
Servomotor op-
eration
(Reverse operation)
(Forward operation)
2 ms min.
Impact
2 ms min.
Note 1. This time chart shows an example of torque thrust.
Note 2. There is a maximum delay of 2 ms in reading the input signal.
Note 3. When switching from torque control to position control, input the pulse command after TVSEL
(control mode switching) has turned OFF, the positioning completed output 1 (INP1) signal
has turned ON, and 2 ms has elapsed. The pulses will be ignored until the positioning com-
pleted output 1 (INP1) signal has turned ON.
Operation Chapter 4

 Loading...
Loading...





