5-20
5-4 Overload Characteristics (Electron Thermal Characteristics)
An overload protection (electron thermal) function is built into the Servo Driver to protect
against Servo Driver or Servomotor overload. If an overload (A.71 to A.72) does occur,
first clear the cause of the error and then wait at least one minute for the Servomotor
temperature to drop before turning on the power again. If the power is turned on again
too soon, the Servomotor coil may be damaged.
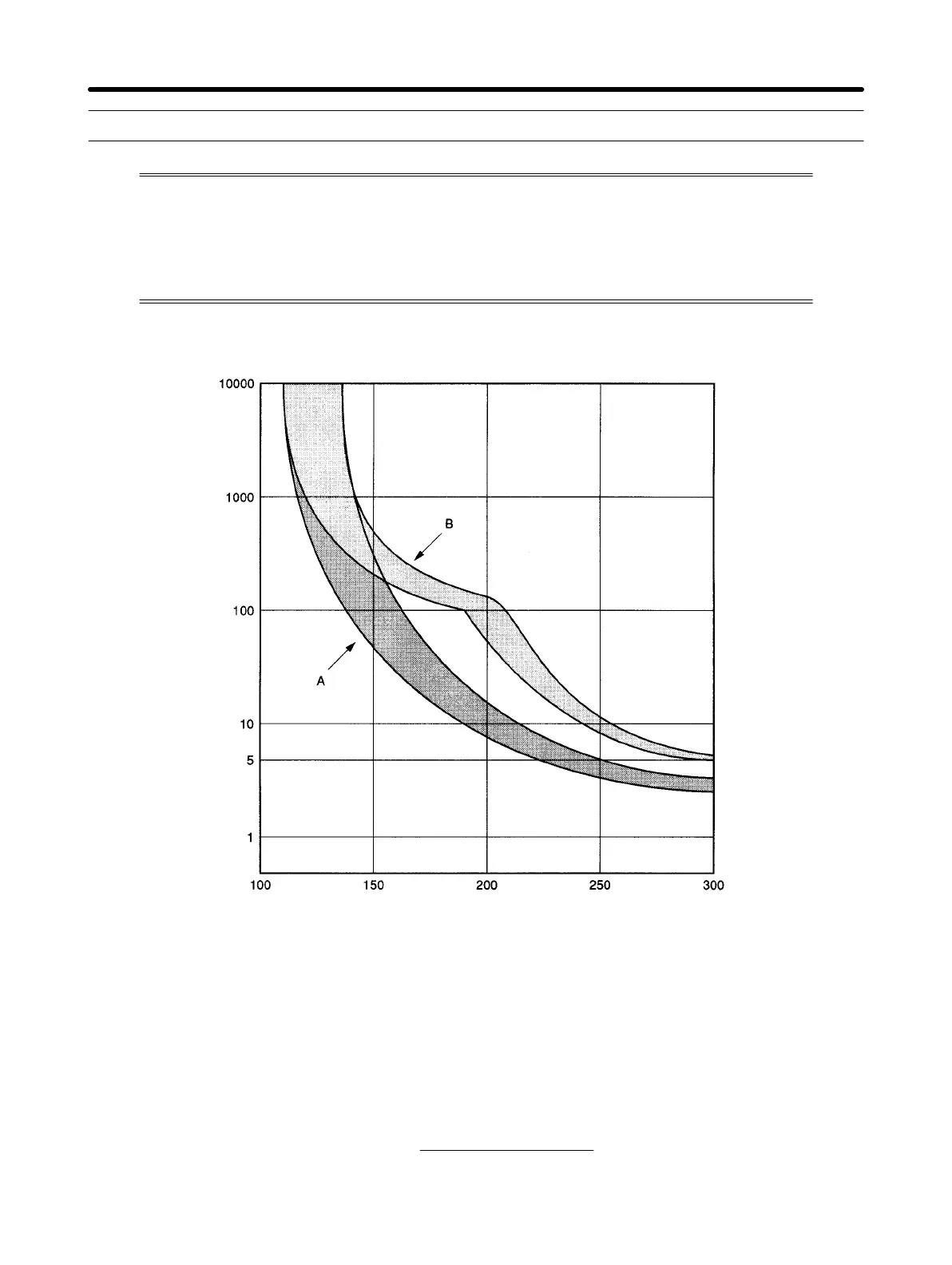
Overload characteristics are shown in the following table. If, for example, a current of three times the
Servomotor’s rated current flows continuously, it will be detected after approximately three seconds.
Load ratio (%)
A: 3,000 r/min.-Servomotors, 30 to 400 W
3,000 r/min. Flat-style Servomotors, 100 to 400 W
B: 3,000-r/min. Servomotors, 750W to 5 kW
3,000-r/min. Flat-style Servomotors, 750 W to 1.5 kW
1,000-r/min. Servomotors, 300 W to 5.5 kW
1,500-r/min. Servomotors, 450 W to 15 kW
Operation time (s)
Note The load ratio is calculated in relation to the Servomotor’s rated current.
Load ratio (%) =
Servomotor current
Servomotor rated current
× 100
Troubleshooting Chapter 5

 Loading...
Loading...





