4-120
D Switching Using Speed Command
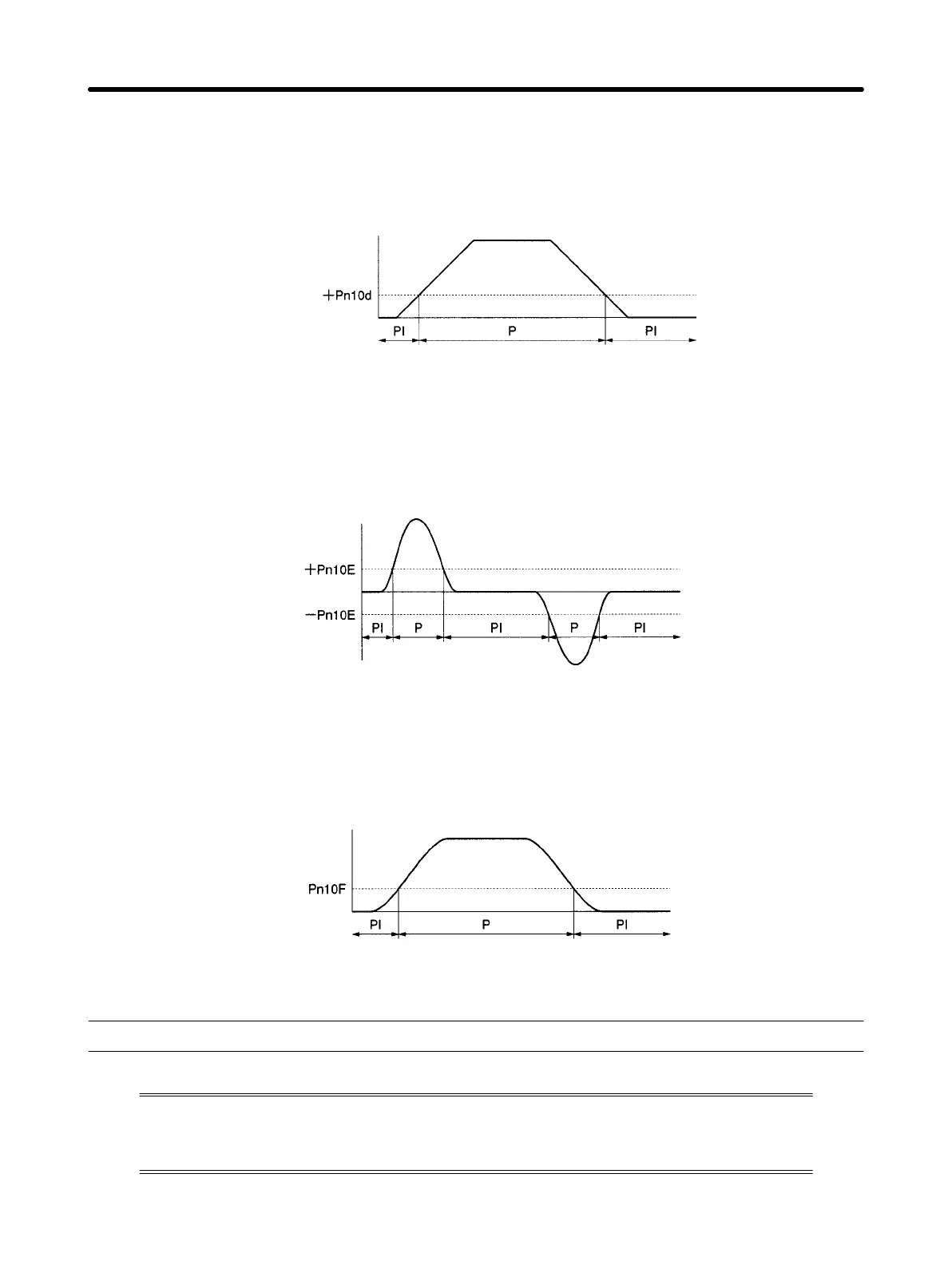
• You can switch to P control when the speed command value exceeds the setting in Pn10d to suppress
speed overshoot and undershoot and so shorten positioning time by reducing gain in the high-speed
area.
Speed command value
Time
D Switching Using Acceleration Command
• You can switch to P control when the acceleration command value exceeds the setting in Pn10E to
suppress speed overshoot and undershoot and so shorten positioning time by reducing gain in the
high-speed area.
Acceleration com-
mand value
Time
D Switching Using Deviation Pulse
• You can switch to P control when the deviation pulse value exceeds the setting in Pn10F to suppress
speed overshoot and undershoot and so shorten positioning time by reducing gain in the high-speed
area.
Deviation pulse
value
Time
4-9 Using Displays
OMNUC C-series AC Servomotors have unique servo software that enables quantita-
tive monitoring in real time, on digital displays, of changes in a variety of characteristics.
Use these displays for checking the various characteristics during operation.
Operation Chapter 4

 Loading...
Loading...





