4-94
H Parameters Requiring Settings
Parameter No. Parameter name Explanation Reference
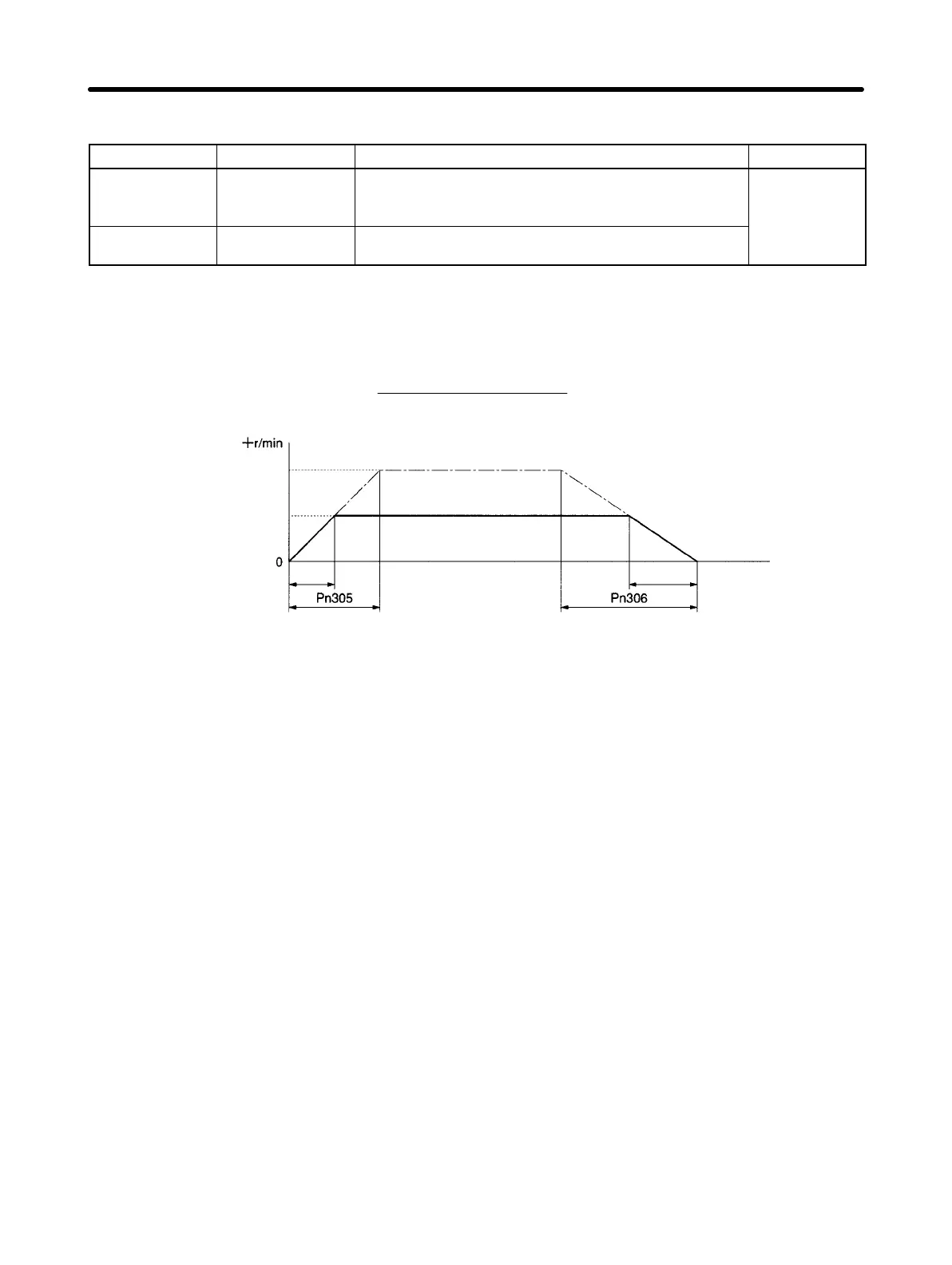
Pn305 Soft start
acceleration time
Set the acceleration time from 0 (r/min.) to the
maximum rotation speed (setting range: 0 to 10,000
(ms)).
4-4-4
Parameter
Details
Pn306 Soft start
deceleration time
Set the deceleration time from maximum rotation
speed to 0 (r/min.) Setting range: 0 to 10,000 (ms).
Note 1. If not using the soft start function, set this parameter to 0 (default setting).
Note 2. The actual acceleration and deceleration time is as follows:
x soft start acceleration (deceleration) time
Servomotor speed
Actual acceleration time
Max. No. rotations
(See note.)
Speed command
Actual deceleration time
Time
maximum No. rotations (r/min.)
Actual acceleration (deceleration time) =
speed command (r/min.)
Note The maximum rotation speeds are as follows:
• 3,000-r/min. Servomotor: 5,000 r/min.
• 3,000-r/min. Flat-style Servomotor: 5,000 r/min.
• 1,000-r/min. Servomotor: 2,000 r/min.
• 1,500-r/min. Servomotor (450 W to 7.5 kW): 3,000 r/min.
• 1,500-r/min. Servomotor (11 to 15 kW): 2,000 r/min.
4-5-12 Electronic Gear Function (Position)
H Functions
• This function rotates the Servomotor for the number of pulses obtained by multiplying the command
pulses by the electronic gear ratio.
• This function is enabled under the following conditions.
When fine-tuning the position and speed of two lines that are to be synchronous.
When using a position controller with a low command pulse frequency.
When you want to set the travel distance for machinery per pulse to 0.01 mm, for example.
Operation Chapter 4

 Loading...
Loading...





