4-115
H Parameters Requiring Settings
Parameter
No.
Parameter name Explanation Reference
Pn10b.2 Speed control
setting ––
Automatic gain
switching
selection
Set the conditions for gain switching in Pn10b.2
1: Switches using position commands
2: Switches using position deviation
3: Switches using position commands and position
deviation
4-4-4
Parameter
Details
Pn124 Automatic gain
switching timer
Set the switching delay time after gain switching
conditions are met.
Pn125 Automatic gain
switching width
Set the amount of position deviation used as the
switching condition when automatic gain switching by
position deviation is used (Pn10b.2 = 2, 3).
Pn104 No. 2 speed loop
gain
Set the speed loop gain for when the Servomotor is
stopped.
Pn105 No. 2 speed loop
differential time
constant
Set the speed loop derivative time constant for when
the Servomotor is stopped.
Pn106 No. 2 position
loop gain
Set the position loop gain for when the Servomotor is
stopped.
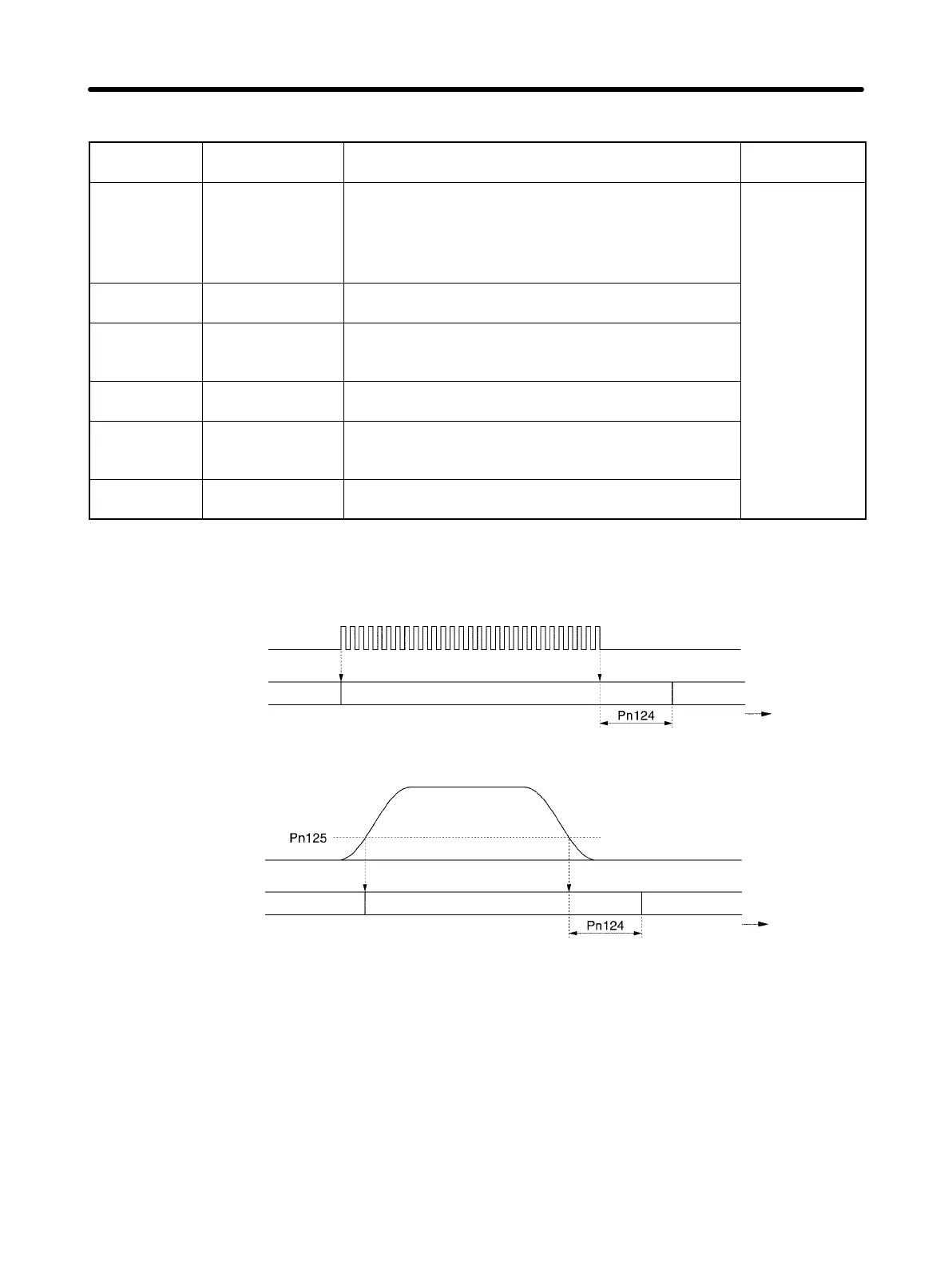
H Operation
D Pn10b.2 = 1: Timing when Switching Using Position Commands
Position command
pulse
Stopped
No.2 gain
Gain
Operating
No. 1 gain
Stopped
No.2 gain
Time
D Pn10b.2=2: Timing when Switching Using Position Deviation
Deviation counter
pulses
No.2 gain
Gain
No. 1 gain No.2 gain
Time
Note Pn10b.2=3: When switching is performed using position commands and position deviation, when
either of the above conditions is met, the gain switches to the No.1 gain.
4-8-7 Notch Filter (Position, Speed, Internally-set Speed
Control)
H Functions
• Set whether or not to use the notch filter for internal torque commands (current loop commands). The
notch filter is used to lower the responsiveness of the set frequency.
Operation Chapter 4

 Loading...
Loading...





