Communication / PROFIBUS 09.2008
6SE7087-6QX70 (Version AK) Siemens AG
8.2-98 Compendium Motion Control SIMOVERT MASTERDRIVES
8.2.9.6 Dynamic Servo Control (DSC)
This function improves the dynamic of the position control circuit, in that it
minimizes the dead times which normally occur with a speed setpoint
interface. For this only a relatively simple extension of the transmitted
setpoints and an additional feedback network in the drive are needed.
The function is upwardly compatible with the speed setpoint interface. If
necessary this can be switched to the speed setpoint interface during
operation.
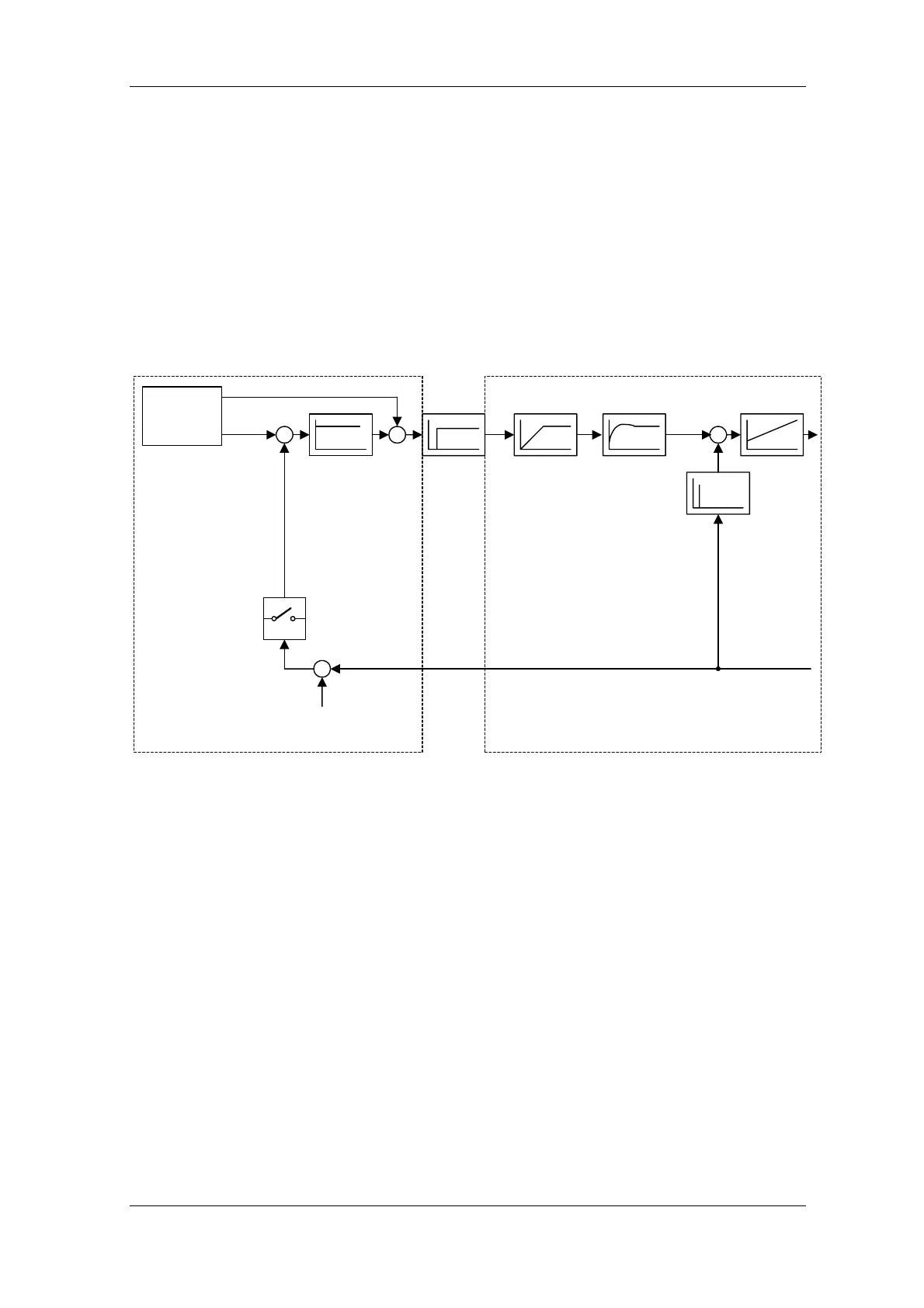
The control circuit based on the speed setpoint interface generally has
the following structure:
Path
interpolation
n
cmd
x
cmd
–
x
act,NC
K
pc
T
pc
Zero offset and
compensation
Master Controller (NC)
–
Drive Controller
x
act
Transmission
delay
n
NC
Interpolation
(T
pc
)
Speed filter
Speed
calculation
Speed control
n
Drive
n
cmd
: speed command
x
act
: actual position
x
cmd
: position command
T
pc
:
position controller sampling time (= T
MAPC
)
x
err
: position error command
K
pc
: position controller gain
Fig. 8.2-32 Structure of the position control circuit based on the speed setpoint
interface without DSC
Features
Structure
 Loading...
Loading...









