03.2010 Communication / CBC
Siemens AG 6SE7087-6QX70 (Version AL)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.4-23
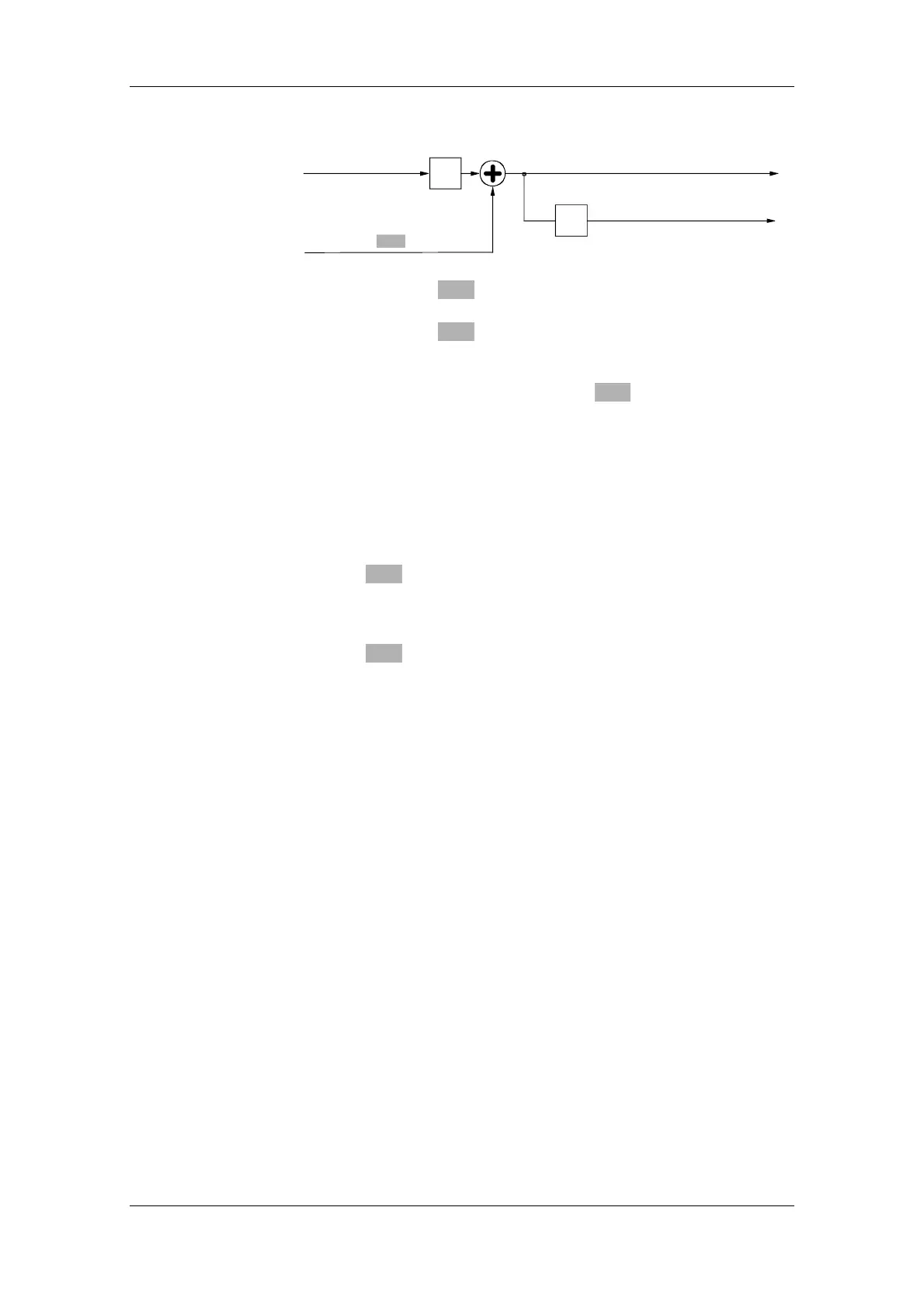
Node address
of the drive (P918)
Basic identifier
for parameterizing
tasks (P711/
P696)
CAN identifier for PKW task
+1
*2
CAN identifier for PKW reply
♦ CAN identifier for the parameter task (PKW task):
(value in P711 / P696) + (value in P918)*2
♦ CAN identifier for the parameter reply (PKW reply):
(value in P711 / P696) + (value in P918)*2 + 1
In addition to the PKW task, a PKW task broadcast is possible, i.e. a
parameter task is simultaneously processed by all bus nodes. The CAN
identifier for this is set in parameter P719 / P704 "CB parameter 9". The
node address does not go in here as the task is to be processed by all
slaves. The associated parameter reply is made with the regular CAN
identifier for the PKW reply as described above.
Parameter-value processing, i.e. the reading and writing of parameter
values of the drives, is to take place in the whole CAN network, from
identifier 1000 onwards.
Specification of the identifiers for PKW task and PKW reply:
Drive with node address 0:
1. P711 / P696 = 1000 (PKW basic identifier)
2. P918 = 0 (node address)
→ PKW task ID = 1000 PKW reply ID = 1001
Drive with node address 1:
1. P711 / P696 = 1000 (PKW basic identifier)
2. P918 = 1 (node address)
→ PKW task ID = 1002 PKW reply ID = 1003
and so on.
Example
 Loading...
Loading...









