9-64
9.2.6 J codes (Application functions)
J01 PID Control (Selection)
J02 PID Control (Remote process command)
J03 PID Control (Gain)
J04 PID Control (Integration time)
J05 PID Control (Differential time)
J06 PID Control (Feedback filter)
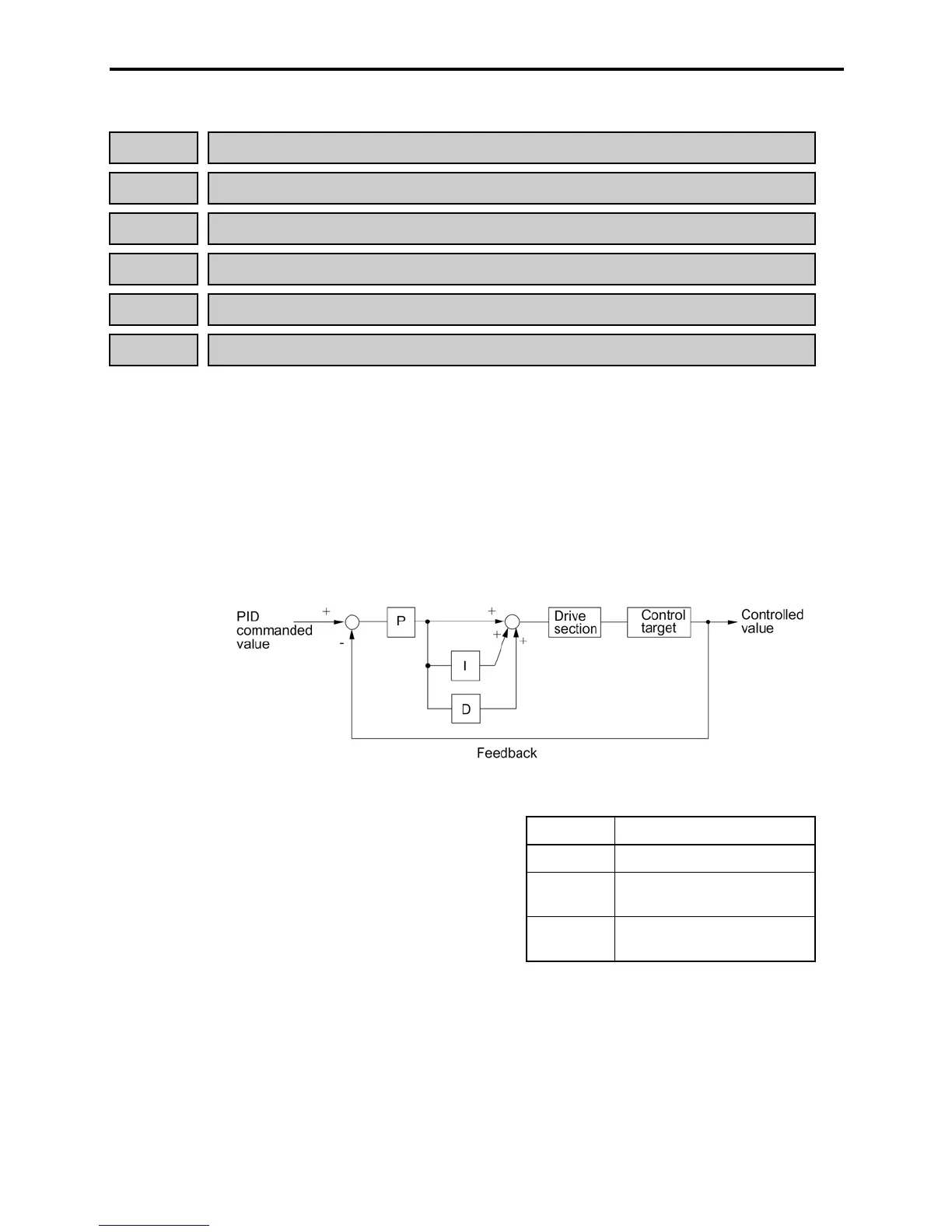
The PID control is a closed loop feed back system that regulates control amounts with
command values, as shown in the schematic block diagram below. Essentially, the system
employs a sensor or similar device and compares it with the commanded amount (e.g. a
temperature control command). If there is any difference between them, the system reacts so as
to minimize it.
Apply the PID control system to process control mechanisms for flow-rate, pressure,
temperature and the like.
If PID control is enabled (J01 = 1 or 2), the frequency block diagram changes to the PID control
block diagram.
Refer to Chapter 4, section 4.8 "PID Frequency Command Generator" for details.
i PID Control Selection (J01)
Data for J01 PID control
0 Disable
1
Enable process control
(normal operation)
Selects PID control status.
2
Enable process control
(inverse operation)
- This function allows inserting the difference (error) between PID command and amount that
have been fed-back so as to drive the motor for normal or inverse operation. Apply this
control to a system increasing/decreasing the motor speed according to any such difference,
such that occurring when an air conditioner is switched between cooling and heating. The
operation mode can also be switched between normal and inverse using the terminal
command (IVS).
Refer to function codes E01 to E03 for details of assignment of the terminal command
(IVS).

 Loading...
Loading...










