21 - Torque And Position Control Parameters
Code Parameter Name / Range
21-00 Torque control selection
0: Speed control
1: Torque control
21-01 Filter time of torque reference
0~1000 msec
21-02 Speed limit selection
0: according AI input
1: according to the set value of 21-03
2: Input by the Communication Address (2502H)
21-03 Speed limit value
-120~120 %
21-04 Speed limit bias
0~120 %
21-00: Torque control selection
Select between speed control and torque control in SV mode.
21-00= 0: Speed control (20-00, 20-09), ASR setting
21-00= 1: Torque control (21-01 to 4), torque control setting
A multi-function digital input terminal (03-00 to 03-08) set to 44 (speed / torque control switching) can be used
to switch between speed and torque mode externally. When the input terminal is active torque control is select-
ed otherwise speed control is selected.
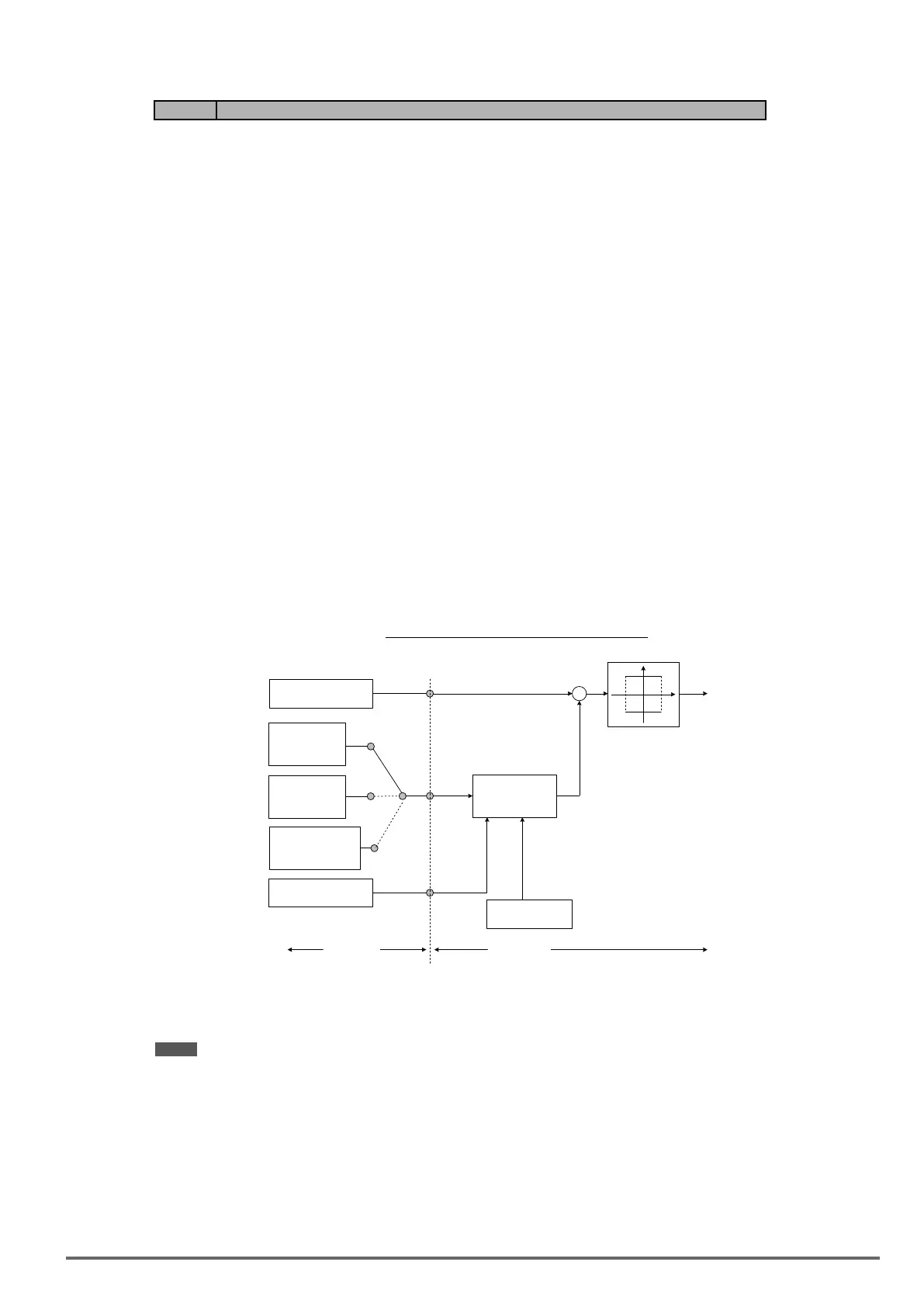
Refer to gure 4.4.108 for the speed control architecture and gure 4.4.121 for torque control architecture.
Figure4.4.121Blockgureofthetorquecontrol
Torque Reference
(from AI 2)
Speed Limit
(from AI 1)
Speed Limit
(set by
21-03)
Speed Feedback
Speed Controller
&
Speed Limiter
Speed Limit Bias
21-04
Tref
21-02=0
21-02=1
N
Lmt
N
FB
+
+
Ⅰ
Ⅱ
Ⅲ Ⅳ
rpm
torque
Torque Limit
(21-05 to 21-08)
Internal
Torque
Reference
Control Block
Input
Methods
Speed Limit
(from communication
address 2502H)
21-02=2
Torque Control
The torque reference command (Tref) uses analog input AI2 (04-05=15)
Note: Torque reference command cannot be set via the keypad.
Multi-function analog input (AI2) can used for torque reference (04-05=15) (torque) or torque compensation
level (04-05=16).
The direction (torque output) of the motor depends on the polarity of the analog input signal (AI2) instead of the
direction of the run command.
Analog input AI2: Positive voltage forward torque reference (Motor direction counter clockwise).
Analog input AI2: Negative voltage reverse torque reference (Motor direction clockwise).
To switch to a negative torque reference set one of the multi-function digital input (03-00 to 03-07) to 45 (nega-
tive torque command), and activate the digital input terminal (Motor direction clockwise).
VDI100 • Instruction manual 271
 Loading...
Loading...








