Chapter 8. How to Use Position Servo
8-9
8.7 Using Monitor
The servo's internal speed command and torque, and the feedback motor speed can be
monitored from outside through the analog output (MONIT1) and (MONIT2). The range of
output voltage is -4[V] - 4[V]. For more information on how to use, see section 7.8 Using Monitor.
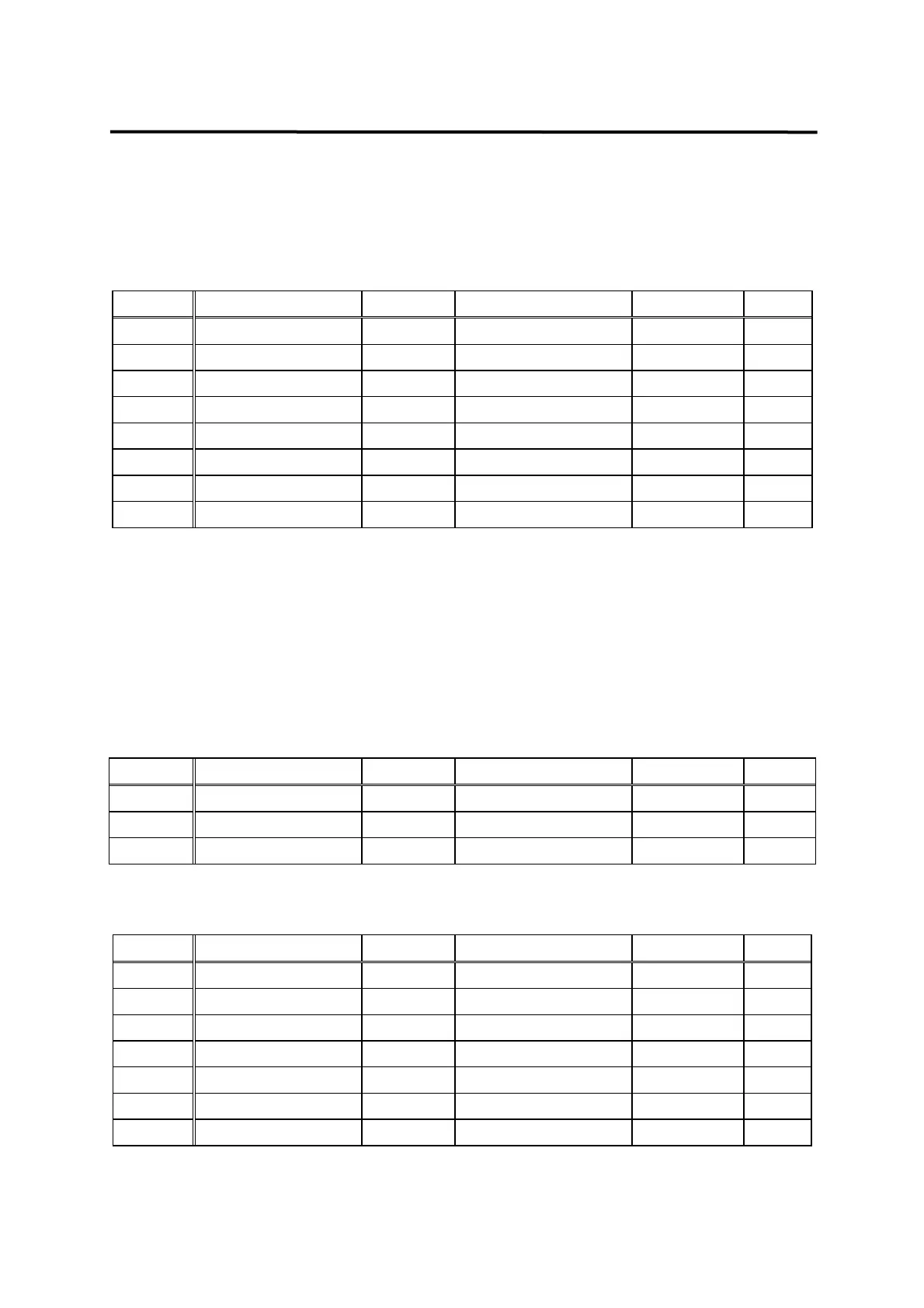
Menu Menu name Unit Display range Initial value Mode
P2-11 Monitor1 Select 0 ~ 2 0 SPT
P2-12 Monitor1 ABS 0,1 0 SPT
P2-13 Monitor1 Scale Multiple 1.00 ~ 20.00 1.00 SPT
P2-14 Monitor1 offset % -100.0 ~ 100.0 0.0 SPT
P2-15 Monitor2 Select 0 ~ 2 1 SPT
P2-16 Monitor2 ABS 0,1 0 SPT
P2-17 Monitor2 Scale Multiple 1.00 ~ 20.00 1.00 SPT
P2-18 Monitor2 offset % -100.0 ~ 100.0 0.0 SPT
8.8 De-resonance Frequency Operation
Mechanical resonance of specific frequency may occur when a system is constructed by using
servo.
To remove such resonance, input the resonant frequency occurring on the system to the
[Resonant FRQ (P2-19)] in terms of [Hz]; input the band width of the resonant frequency to
be removed to the [Resonant BW (P2-20)] in terms of [Hz]; and select [De-Resonance ENB (P2-
21)] as 1.
Menu Menu name Unit Display range Initial value Mode
P2-19 Resonant FRQ[Hz] Hz 0 ~ 1000 300 SP
P2-20 Resonant BW[Hz] Hz 0 ~ 1000 100 SP
P2-21 De-Resonant ENB 0,1 0 SP
8.9 Other Set Values
Menu Menu name Unit Display range Initial value Mode
P2-07 Pulse Out Rate Division 1 ~ 16 1 SPT
P2-08 Current Offset 0, 1 0 SP
P2-25 Parameter Init currt/dFLT currt SPT
P2-27 DB Control 0,1 1 SPT
P2-28 Display Select 1~10 1 SPT
P2-30 Emergency Type 0,1 0 SPT
P2-31 Power fail Mode 0,1 1 SPT
 Loading...
Loading...